
 この画像を大きなサイズで見る
この画像を大きなサイズで見る背筋が凍るような、それでいて目が離せない衝撃的な映像がネット界隈をざわつかせている。
二足歩行のヒューマノイドロボットが、突如としてその体を折り曲げ、映画『エクソシスト』の名シーン「スパイダーウォーク」さながらに、地面をカサカサと這い回り始めたのだ。
ロボット研究者が公開したこの動画は、関節をありえない方向にねじ曲げて高速移動するロボットの姿を捉えており、そのあまりの不気味な動きに技術への畏敬の念と本能的な恐怖が入り混じった声が続出している。
ネットを震撼させたヒューマノイドのスパイダーウォーク
ロボット製作者であり研究者でもあるローガン・オルソン氏は2025年11月5日、自身のSNSに戦慄の映像を投稿した。
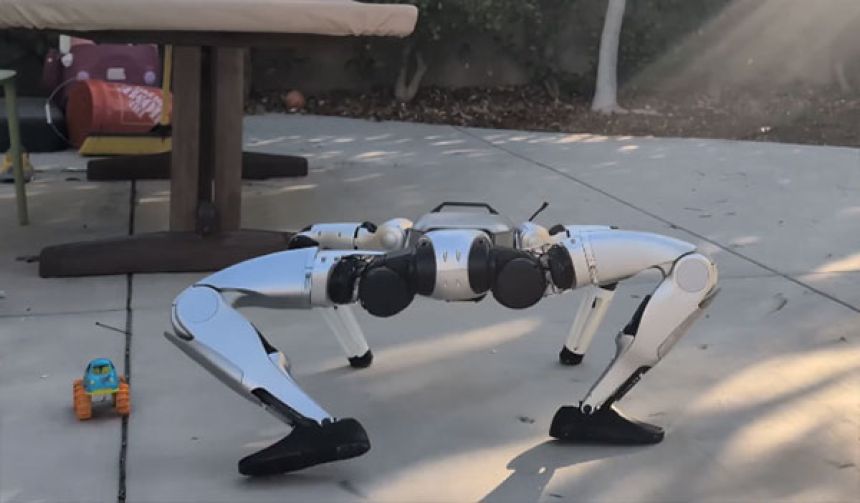
自律二足歩行が売りのヒューマノイド(人型ロボット)が、突然バタリと四つん這いになりなった。
すると不気味なほどの柔軟性で手足はねじ曲げ、四つん這いになって、スパイダーウォークさながらの動きで素早くカメラの方に近づいてきたのだ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る「怖っ!」と思ったその瞬間、踵を返すようにロボットは向きを変え、カメラとは反対方向に這いながら進んでいく。
「ふぅっ…」あっちにいってくれたか、と安心してはいけない。またしても全力でカメラの方へと猛スピードで近づいてくるのだ。
この映像はすでに97万回以上再生され、ネットユーザーの好奇心と恐怖心を同時に刺激した。
ヒューマノイドロボットがますます身近になってくる中、普通に作業をしていたロボットが、急に四つん這いになって自分を追いかけてくる未来が見えてきて、悪夢にうなされそうだ。
AIが実現した驚異の身体能力
オルソン氏は、ヒューマノイドにできることの限界を広げようとしている。2025年の春、彼は中国のロボット企業 Unitree社製の「G1」という比較的手頃な価格の高性能ヒューマノイドを入手し、様々な改造や実験を行ってきた。
しかし、今回の「這い歩き」は、これまでとは次元が違う不気味なレベルに達している。
動画では、G1が直立姿勢からわずか数秒でスムーズに四つん這いへと移行する。その手足は不可解なほど正確に曲がってねじれ、人間とロボットとクモを混ぜ合わせたハイブリッドのような姿になる。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこの偉業を達成するために、オルソン氏は独自のAIベースの「クロール・ポリシー(這うための制御方針)」を使用した。
これは、AIの強化学習を用いて、ロボットが「立つ」「歩く」「這う」という全く異なる動作の間を滑らかに切り替えられるように開発した制御システムだ。
彼がハロウィンに合わせてロボットにかつらと服を装着させた状態で、地面をカサカサと這い回らせたところ、映画『リング』の貞子や、『エクソシスト』の少女リーガンさながらのホラー感が漂い、その不気味な動きは、近所の人々を本気で驚かせたという。
ヒューマノイドの未来はどうなる?
この映像は、AIとロボット工学の進化を物語ると同時に、「ロボットは人間の動きを再現すべきか、それともロボットとして最適な動きを追求すべきか」という本質的な議論を突きつけている。
Amazonの倉庫などで働く二足歩行ロボットを開発するAgility Robotics社のAI研究科学者、クリス・パクストン氏は、多くのヒューマノイドが見せる人間らしい動きは、あくまで訓練による「模倣」にすぎないと指摘する。
ハードウェアとしてのポテンシャルを解放すれば、今回の動画のような人間には不可能な動きの方が、実は効率が良い場合があるのだ。
人間の動きは人間の骨格に最適化されたものであり、金属の体を持つロボットにとっての正解とは限らない。
テスラ社の「Optimus(オプティマス)」や、新興企業のFigure AI社、そしてUnitree社など、様々な企業が開発を競う中で、このテーマは無視できないものになっている。
テスラ社の元開発責任者クリス・ワルティ氏も、「反復作業において人間型が必ずしも理想的ではない」と語っている。
オルソン氏による不気味なスパイダーウォーク動画は、ヒューマノイドの多様な可能性を浮き彫りにした。
這い回るロボットは、人間の真似事を超えて、どれほど自由で驚くべき能力を発揮できるかを示す強力な証拠となったのである。
References: Video: Crawling humanoid robot shocks the internet with its animal-like moves
















グリーヴァス将軍やがな
BLAME!というアニメに出てくる駆除系そのままだな。
重力子放射線射しゅちゅ・・・射出装置の開発が待たれる。
攻殻機動隊やん
でも人間社会の中で作業するなら人間に似た動きの方が自然に溶け込めて心理的なハードルも下がるだろうしなあ
物理的にも、人間と混在で作業するなら、
こんな視野角外の膝下の高さを高速で動き回られたら、事故待ったなしだろうしな。
一旦この形態ができるのを知ってしまったらもう怖い
Oooh きっと来る きっと来る 季節は白く
ゴキカブリみたいだな
画像にカサカサカサ…と書いてあって、またパルモさんが変なものを見つけてきたのか、動画あったら再生してみるか…と思ってスクロールしてたら勝手に始まって笑い転げた
不意打ちで見たから、より笑えた
何のためにこんなの作ったんだろ(解説読まずにコメ欄に来た)
やべぇ…命も無いのに頃し合いそう…
ダックスフンドに蜘蛛の着ぐるみを着せて
暗い地下道を歩いている人を驚かせるドッキリが
昔あったわね
みんな巨大な蜘蛛か
得体の知れない何かがいると思って
走って逃げていった
心臓の悪い人が見たら発作を起こしそうだった
何を学習しだんだ君はw
普段ホラーもの見ないからか、ハロウィン仮想動画は急に上げられた叫び声の方がよっぽど怖かった……。
怖い怖い怖い
ロボット「あれ? 俺何で二足歩行しているんだろう… こっちのほうがええやん!!」
無限にわらってしまう
いや君は正しい
そりゃそうだろう
そうだろうがそうじゃないんだ
意外とバタバタした動きで可愛いかもしれない…
鉄骨みたいな細い足がたくさんあったらもっと忌避感ありそうだけど
なら最初からケンタウロス形状にしておくのが合理的では?
これ熊に見せたら逃げていくよ
BLAMEのあれだな
大丈夫、メガネを探してるんだと思えば怖くない
よく見ると膝が外側に開いていて四つん這いとも違うんだよ
そのまま動くし、なかなかにシュール
山本由伸の来季のトレーニングはこれや
夜エンカウントしたら腰抜かす自信がある
若干生理的な嫌悪感がある動きだな
SIRENってゲー厶に出てくるクモ屍人がこれに似ている
┌(┌^o^)┐
このAAを思い出した
問題はどこで稼働するかかな。
何かのイベントなら「おおぅ!」と思うし、自分ちだったら「あ”ぁッ!!」って思うし…。
まぁ、この技術が良いことに使われる事だけ祈ることにしよう…。
座敷女
ブラックマジックM-66
立ち姿勢から四つん這いになる間に、ショック吸収と姿勢制御の為か
一瞬ガニ股中腰になるのがまたイイ感じで変形メカっぽくてステキ
こうやって見ると、虫って合理的な形状をしているんだな。
カツカツカツカツって音が怖い
「むにむに公園」の、遺伝的アルゴリズム(*)で 球体関節人形にハイハイを学習させる動画を思い出した。
(*膨大なサンプル個体に無作為な動きをさせ、よく進んだ上位層を“親”として その動作を受け継ぐ“子”サンプルをまた多数作り、試行を繰り返して最適化させていく。)
関節の動き自体は人間と同様に設定していたけれど、「目で進路を確認する」「痛みに強い部位と弱い部位がある」といった要素は盛り込んでいなかったため、結果、人形が生み出した“効率の高い移動法”は「頭を地面に擦り付けながら、開脚を交互に振り回して後退で進む」という、ハイハイとはかけ離れたブレイクダンスもどきだった。
「先行者 2」 ?
この姿勢は、エネルギー効率かなり悪いはず。限りあるエネルギーを燃料としてる限り、ロボットだろうが生物だろうが長く動くのかなり難しい。
人間で言えば腕立て伏せの姿勢で歩くようなもん。絶対きついでしょ。爬虫類もできてない、動かない時間が多い。…昆虫みたいな生き物どうなんだろう?あれも結構動かない時は動かないしね。
人は動物界でも持久力が突出してるというが、2足歩行が秘訣の一つだと聞いたな
それ、「四足歩行の獣が高速のギャロップ走法をするときは、背中を丸めて引き付ける動作と 手足を投げ放って胴を平らに伸ばす動作とを繰り返すから、全身運動で消費エネルギーが大きい」って話では?
人間は、基本 動かすのは脚だけで、上半身の胴体は変形させたりしないので、省力タイプの「じわじわ長く」な走りができる。
このロボットは、胴体は伸縮的な可変部ではない胸板と背板だから、そういう四ツ足哺乳類の短距離走型なエネルギー消費様態とはまた異なると思う。
人間は頭が重いから四足歩行だとどうしてもバランスが悪くなってしまう
道具を使うには前脚が自由になっていた方が都合がいい
頭がそれほど重くなく、前脚を自由にしておく必要もない生き物が今も四足歩行なのは、その方が効率がいいからなんだと思う
もしこのロボットの重心が頭ではなく胴体にあるなら四足歩行も十分にアリだし、必要な時には立ち上がって手を使えるから問題ない
つまり…タコ型宇宙人は理に適っていた…?
なんやかんや言ってもやっぱり四つん這いがいいんだね
名前が「G」1というのがまた…
アニメ妖獣都市でもこんなのいたなあ、、
バイトの印象いい女の子に化けた魔界の蜘蛛女ね。よくご存知で。
エクソシストだ…
友達んちのロボットに内緒でパズズモードをインストールという未来のドッキリを思いついた
2足歩行の必要性が分からなくなるな?
踏んでも踏んでも再起動して
四つ脚でどこまでも追われる
デストピアな未来が見えるのは
自分だけでしょうね。
「ひぃっ」てウッカリ変な声出てしまった。
確かにこれはちょっとぞわぞわする。
極めてなにか生命に対する侮辱を感じます
こわかったよぅ(´༎ຶོρ༎ຶོ`)
犬だと思えば怖くねえよ。おぅワンワン鳴いてみろよ。 3回だよ3回。
メトロイドドレッドにこんなの居たなぁ
攻殻機動隊に全く同じものがいたぞ