
 この画像を大きなサイズで見る
この画像を大きなサイズで見る選ばれしものは第三の眼となる邪気眼を持っているそうだが、今、科学者たちが真剣に開発しているのは体に装着することのできる第三の腕だ。
もう1本腕があったらどんなに便利かと考えたことはないだろうか?手術や作業現場、アート活動など、普通より使える腕が多ければきっと便利に違いない。
英インペリアル・カレッジ・ロンドンと独フライブルク大学の研究チームは、実際にそのような第三の腕となるロボットアームを”思考”で操作する研究を行っている。
だが人間が生まれ持った腕は2本だけだ。本来ないはずの3本目の腕を、コントローラーを使わずに思考だけで操作するなど、本当にできるのだろうか?
これまでの研究では、人間の果てしない可能性を感じられる結果が得られている。その成功の鍵は「使われていない神経シグナル」であるようだ。
人間の体の機能を拡張
第三の腕のように、人間の体を拡張する技術のことを「ムーブメント・オーグメンテーション(運動拡張)」という。
これが実現すれば、人は思考だけでロボットアームを操り、これまでは不可能だった作業ができるようになるという。
最近では手術でロボットアームが使われることもあるが、普通の外科医が同時に操れるのは、持って生まれた2本の腕だけだ。だがもし第三のアームを使えたら、さらに高度な手術ができるようになるだろう。
建設現場で働く作業員なら、ロボットアームで大きなパネルを支えながら、自由な両腕でボルト固定するなんてこともできる。
あるいは第三の腕を鍵盤の上で踊らせて、これまでは絶対に不可能だったピアノの超絶プレイを披露することもできるかもしれない。
 この画像を大きなサイズで見る
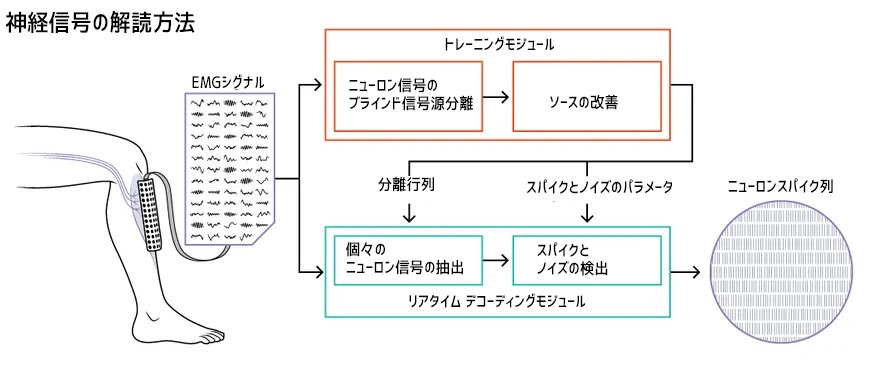
この画像を大きなサイズで見る電極アレイ(左側)が読み取った筋電図シグナルは訓練モジュール(オレンジ枠)に送られ、ここで各神経細胞のシグナルを抽出する方法を決定。
そのプロセスを分離行列などのパラメータとして数学的に要約する。これらに基づき、解読モジュール(緑枠)が、筋電図シグナルから各神経細胞のスパイク・シーケンス、すなわち「スパイクトレイン」(右側)をリアルタイムで効率的に抽出する / Image credit:CHRIS PHILPOT
筋電図から思考を解読
思考で機械を操作する技術としては、「ブレイン・コンピュータ・インタフェース(BCI)」が研究されている。しかしBMIは外科手術で脳にインプラントを埋め込む必要があるので、専用の研究施設以外では使いづらい。
そこで今回の研究チームが採用したのが「筋電図」だ。
これは皮膚に電極をとりつけて、脊髄の神経細胞から伝わってくる筋肉への指令を検出するもの。その電気シグナルから意図する体の動作を読み取ってやれば、ロボットアームを操作することもできるはずだ。
そのため開発されたのが、「訓練モジュール」と「解読モジュール」だ。
まず、被験者の体に電極をとりつけ、筋肉を軽く動かしてもらう。すると「訓練モジュール」が筋電図パターンと運動ニューロン(筋肉への指令を出す神経細胞)のシグナルとの関係を分析し、それを数学的に要約する。
次にそのデータを元に、「解読モジュール」がリアルタイムで筋電図から運動ニューロンのシグナルを読み取る。実験では、読み取りにかかる時間はほんの数ミリ秒だけで、十分実用的な速さがあることが確認されている。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る被験者は、普段は使われない神経帯域幅を利用して、画面上のカーソルを操作する。神経信号は、脳や脊髄から脊髄の神経細胞を経由して前脛骨筋(すねの筋肉)に到達。
これを電極アレイで読み取り、リアルタイムで解読する。
そうした信号には、筋肉を収縮させる低周波(青)のほか、生物学的な目的がわからないベータバンドなどの高周波成分(黄)やノイズ(灰色)が含まれている / Image credit: M. BRACKLEIN ET AL., JOURNAL OF NEURAL ENGINEERING
鍵を握るのは運動ニューロンが発する高周波シグナル
こうした実験では、1つ面白いことが明らかになっている。理由はわからないが、運動ニューロンは本来筋肉を動かすために必要なものより、ずっと豊富な情報を送信しているようなのだ。
筋肉を動かそうとする運動ニューロンが発するシグナルには、高周波と低周波が含まれている。ところが、実際の筋肉の動きに関係するのは低周波数だけなのだ。
そこで研究チームは、使われていない高周波シグナルをどうにか利用できないかと考えた。
はたして、普段は使われないシグナルを人間が意図的に操作することなどできるのだろうか? これが大きな疑問だった。
それを検証するための実験では、被験者のすね(皮膚のすぐ下に前脛骨筋がある)に電極をつけ、先ほどのモジュールを介して画面上のカーソルを操作できるかどうか試してみた。
このとき、運動ニューロンからの高周波シグナルはカーソルのタテ移動に、低周波シグナルはヨコ移動に対応させてあった。
つまり被験者がカーソルを自由自在に操作するには、意志の力で高周波シグナルと低周波シグナルを操る必要があったのだ。
ここで、人間のすばらしい可能性を感じさせるようなことが起きた。
被験者は見事にカーソルを自由に動かしてみせたのだ。どうやればカーソルを操作できるのか、具体的に説明されていなかったにもかかわらずだ(そんなことは研究チームにもわからなかった)。
 この画像を大きなサイズで見る
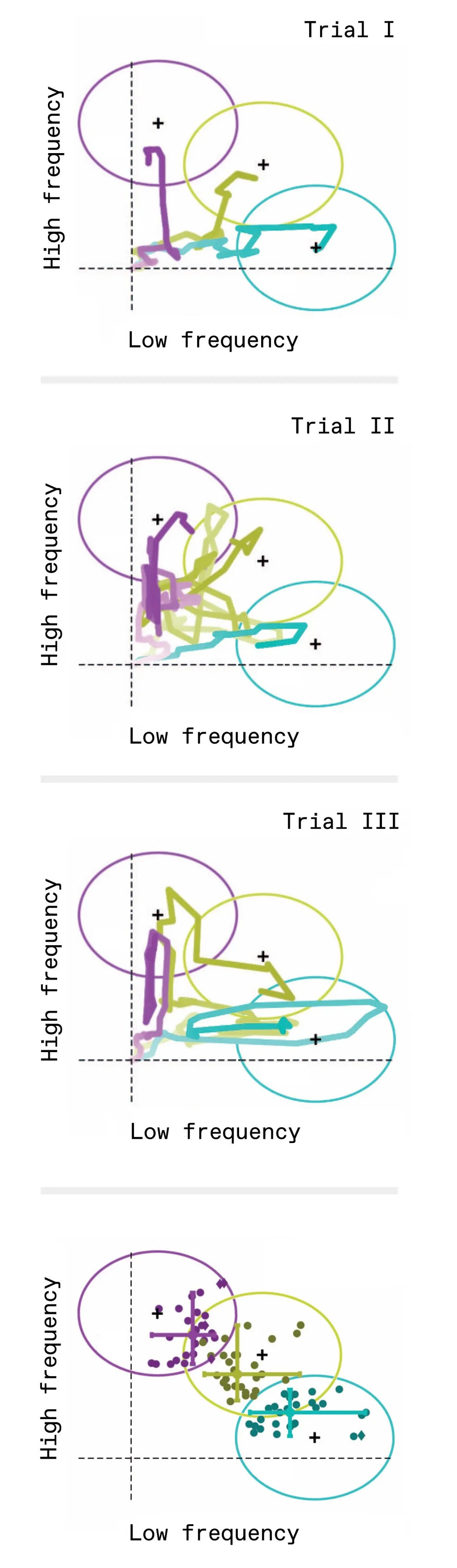
この画像を大きなサイズで見る画面のカーソルを動かす実験の結果。ヨコの動きは低周波、タテの動きは高周波の神経シグナルで操作された。
楕円はカーソルを動かすゴール(プラスは円の中心)を表す。
上から3つの図は、各被験者が左下にあったカーソルをゴールさせるまでの軌跡。一番下はカーソルがゴールした時点の平均位置を表す / Image credit: M. BRACKLEIN ET AL., JOURNAL OF NEURAL ENGINEERING
研究チームはIEEEで、「自然な運動タスクとは別の神経制御チャンネルを探し出す大きな一歩を、被験者がたやすく成し遂げたことに驚き、興奮しました」と述べている。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る人間が第三の腕を得るための課題
とは言え、運動拡張技術を実現するには、解決すべき課題がまだまだたくさんあるようだ。
被験者は確かにカーソルを思考で操作することができた。だが、それはそれほど正確なコントロールではなかった。
ただの画面上のカーソルですら難しいのだから、ずっと複雑なロボットアームの操作の難しさは想像を絶するだろう。
もう1つの課題は、人間の脳が外部拡張デバイスの「直感的な制御」に慣れてくれるのか、よくわからないことだ。つまり練習でこの手の操作が上手くなるのかどうか、まだわからないのだ。
だが少なくとも、本来備わっていない第三の腕獲得に向けて、人体にすばらしい可能性が秘められていることだけはわかるだろう。
References:Roboticists Want to Give You a Third Arm – IEEE Spectrum / written by hiroching / edited by / parumo














本来なら自在に動かせる尻尾が生えてた訳だし
耳も好きな方向に向けられて当然だったのだから
第三の腕ぐらい自然に制御できるんじゃないのかな。
意識すれば鳥肌も自在に立たせられるようになるし
あくびも意図的に出せるようにもなる。
生物としては大きく退化したとは言え
人間の可能性ってそんなに低くは無いと思うんだ。
千手観音様みたいにたくさんあってもそれはそれで大変だ
エルデンリングで似た方を見た事ある
第三といわずあと2本くらい欲しい
勝手に動く第三の腕?ならもってるぜ!
>>5
>>15
お前らそのポークビッツしまえ
シュトゥッツァー かな
ラズロかな?
自動車のシャーシに鋳込んでしまおう!
第三の目なら欲しいんだけどな
>>9
時雨さんに頼んでみましょう
「脳は末端の奴隷」って言葉があるように、脳が発達したのは人間の体を制御するために発達したのだから、新たな末端が増えると脳に新たな変化が訪れるかもしれないし、もしかしたら通常の肉体の制御になにか不具合が発生するかもしれない。
阿頼耶識システムかな?
スパイダーマンで見た
便利そうでは有るけどかなり訓練しないと三本同時操作は難しそうだなぁ
左右同時だってそれなりに訓練必要だもん
ブラインドタッチとか楽器とかさ
ジオかな。
第3の脚ならもうある
少々思い通りにならないのが難点だ
そこそこ若くして脳梗塞により右半身の運動機能を完全喪失し5年ほどかけてほぼすべての機能を回復させた経験がある。
その時にリハビリテーションで行ったのがまさにコレで脳の中の運動神経の再構築だったな。
最初はまるで念力で右手を動かすイメージでね、少しでも動いたらそれを反復させて体に覚えさせるの。200種類以上の運動機能の鍛錬をして5年間で小学生並みの器用さまで回復できた。
第三の腕はそこまで切迫した状況でないから取得には手間がかかるかもしれないけど、コンピュータの補助とかがあれば細かい作業も正確にできるようになるかもね。
Dr.オットー
ISDNみたいだなぁ、電話線の使用していなかった高周波帯域を利用してなにか送るのみたいだ
年老いた私には無理だけど
ボタン多数のゲーム機をやってる子供にならちょっとの訓練で使いこなしてしまうのでは?と思ってしまう
理性で操作できない第三の足ならほら
両手でゲームしながらメシが食えるじゃん!
生身の腕でも画面上のカーソル移動は普通に苦労してるんじゃが(シューティングゲーム感)
GUNDフォーマット…
ハンダづけが楽になりそうだな
日本人が作成したら「キャット・ハンド」と名付けて欲しい