
 この画像を大きなサイズで見る
この画像を大きなサイズで見る月や火星の果てしない荒野を、犬型ロボットが自ら足運びを判断して突き進む。そんなSFのような光景が、宇宙探査の常識を塗り替えようとしている。
これまで地球からの指示待ちで一歩ずつしか進めなかった探査車に代わり、人間が指定した目標まで自らルートを考えて動く「半自律型」の4足歩行ロボットが、調査スピードを2倍以上に加速させる可能性が示された。
スイスのチューリッヒ工科大学などが発表したこの技術は、宇宙資源の特定や未知の生命探しを劇的に効率化する、探査の「新時代」を切り拓く鍵となる。
この研究成果は『Frontiers in Space Technologies』(2026年3月31日付)に掲載された。
参考文献:
- Legged robot could accelerate resource prospecting on the Moon and the search for life on Mars
通信遅延による探査の停滞をロボットが解消
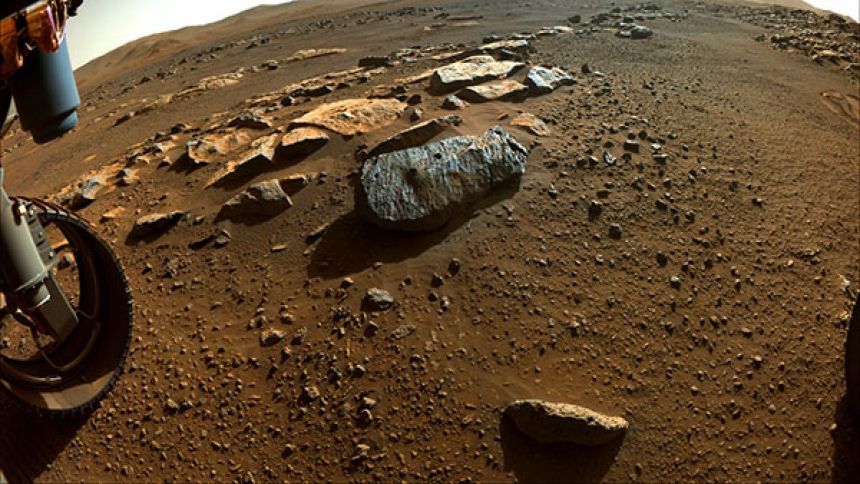
現在の火星探査には、越えられない「時間の壁」が存在する。火星と地球の間で通信を行うと、電波が届くまでに片道で4分から22分もかかってしまうのだ。
このタイムラグがあるため、地球の科学者たちは探査車の動きをリアルタイムで操作することができない。
慎重に計画を立て、安全を確認しながら進めるしかないため、これまでの探査車が1日に移動できる距離は、わずか数百mほどにとどまっていた。
この停滞を打破するために生み出されたのが、人間とロボットが役割を分担する「半自律型」のシステムだ。
科学者が「あの岩を調べて」と大きな目標を指示すれば、あとは4足歩行の犬型ロボットが地球からの返事をいちいち待つことなく、自らルートを考えて障害物を避け、次々と調査を進めていく。
この自律的な動きこそが、広大な惑星の表面を効率よく歩き回るための最大の武器となる。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る犬型ロボットが月や火星の過酷な岩場を走破
今回の実験で抜擢されたのは、四足歩行で動く犬型ロボット「ANYmal(アニマル)」だ。
これまでの探査車はタイヤで進むため、大きな岩が転がる場所や急な斜面では立ち往生してしまう危険があった。
しかし、しなやかな足を持つANYmalであれば、デコボコした険しい地形でもバランスを取りながら、まるで動物のようにスムーズに乗り越えていくことができる。
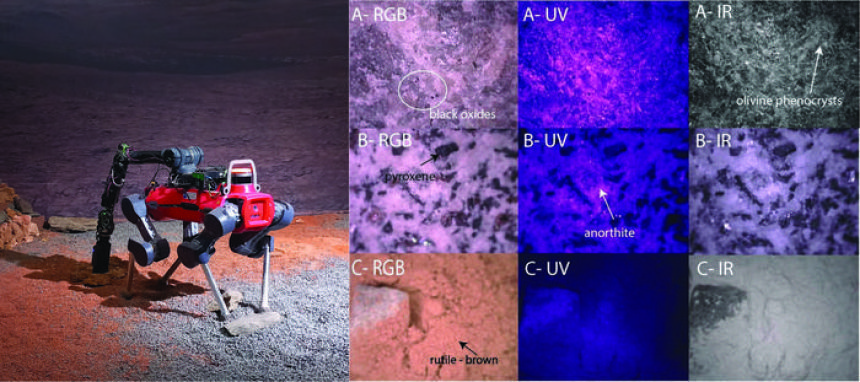
さらに、このロボットの背中には自由自在に動く「ロボットアーム」が搭載されている。
アームの先端には、岩石を拡大して映し出す顕微鏡カメラの「MICRO」と、物質の成分を光の散乱で特定できる「携帯型ラマン分光計」が装備された。
ロボットは目標の岩石まで自分の足で近づき、アームを器用に伸ばして直接岩石に触れるようにして分析を行う。まさに「科学者の目と手」がロボットと一体化しているのだ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る模擬環境での実験で従来の2倍以上の調査スピードを証明
研究チームは、スイスのバーゼル大学にある「Marslabor(火星実験室)」という施設で、このシステムの実力をテストした。
そこには惑星の表面を覆う細かな砂塵「レゴリス」や、本物の岩石が敷き詰められ、宇宙の光の条件が再現されている。
実験の結果、人間が一つひとつ指示を出す従来の方法では分析に41分かかったのに対し、半自律型ロボットはわずか12分から23分で同じ作業を完遂した。
しかもただ速いだけではない。
ロボットは月面で重要な資源となる「斜長岩」や、惑星の内部を知る手がかりになる「ダナイト(Dunite)」、さらに「石膏」や「玄武岩」といった科学的に価値の高い岩石を正確に見分けることにも成功した。
スピードを上げても、調査の質は一切落ちないことが証明された。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る宇宙資源の特定や生命の痕跡探しが効率化される
この半自律型の四足歩行ロボットが実用化されれば、未来の宇宙探査はこれまでよりも効率的に進むだろう。
限られたミッション期間の中でより広い範囲を走り回り、貴重な資源や、かつて火星に存在したかもしれない生命の痕跡「バイオシグネチャー」を、これまでにない効率で探し出せるようになるからだ。
これからの宇宙ミッションでは、機敏なロボットたちが先陣を切って地形をスキャンし、特に重要な場所だけに「目印」を立てていく。
地球の科学者たちは、ロボットが精査したデータを見て、最もワクワクする発見に集中できるようになる。
犬型ロボットは、人類が月や火星の謎を解き明かすための、最高に賢く頼もしい相棒になるに違いない。
















SCP4183を思い出した。
ロボットの自立がもっともっと進めば、指示役の人間が万が一滅亡したのちもロボットは与えられた使命を着々と遂行し続けて宇宙の謎を解き明かす最初の発見者になるのかも
今回の記事では二つの新しい試みがあるってことですね。 一つは一部であっても初めて自律型になるかもという話、もう一つは初めて多脚型な観測の仕組みが採用されるかもってことですね。 火星でヘリコプターが採用されましたが、四本脚のままなのか六本脚になるのかはわかりませんけどおそらくエネルギー効率は車輪のほうが良いでしょうが、脚のおかげで車輪ではいけないところに行けるはずってところが期待ですね
宇宙飛行士が今ほど必要なくなるかもしれないな。
やっと育ったエリートを2~3人しか送り込めないより
ロボット数百体を一斉に着陸させて一気に調査した方が早い。
工場を建設できれば人数はあまり要らない
というかテラフォーミングも余裕だと思う
逆にロボットが初期調査をどんどん終えちゃうから、
その場所に本調査や資源確保に行くための宇宙飛行士が足りなくなるかも?
未来の世界の〜犬型ロボットぉ〜♪ほんわかパッパほんわかパッパドラえもん♪
月の情報収集となれば、技術を持っているいろんな国が我先にバンバンロボを送り込みそうな気がする。
月はまさに無法地帯だから、今のうちに月面の秩序が保たれるように法整備した方がいい気がする。
近い将来、月にロボが溢れて地球と同じようにオイシイ場所は取り合いになる。ロボが他国のロボを攻撃出来る武器を装備して送り込まれ、月でロボ戦争が起こる…。
火星に行っても同じように人類は争うだろうから、人の安住の地は宇宙にもないような気がする…。
宇宙法はあるけど、俺も守られるかは怪しいもんだと思ってる
宇宙開発出来るとこは、今のうちに資源ありそうなところは科学名目で調査しちまって、俺が見っけたんだから掘るなら一枚噛ませろよってやる準備をやってると思う
あぁ、人類ってあさましいなぁ…。
たかだか80~90年しか生きられないなら、後世が争わないようにしてやればいいのにねぇ…。