
 この画像を大きなサイズで見る
この画像を大きなサイズで見る近い将来、ロボットのサッカー選手が世界を熱狂させるかもしれない。
ナイキのシューズがよく似合うそのサッカー選手は「アルテミス(ARTEMIS)」という。カリフォルニア工科大学ロサンゼルス校のエンジニアによって開発された世界最速の汎用人型ロボットで、不安定な路面でも走れる優れたバランス感覚が自慢だ。
そんなアルテミスは、その抜群の身体能力を見せつけるべく、今年7月にフランスのボルドーで開催される世界最大のロボット・AIコンペ「2023 RoboCup」のサッカー部門に出場するのである。
世界最速の人型ロボット「アルテミス」
アルテミス(ARTEMIS)の名は、「Advanced Robotic Technology for Enhanced Mobility and Improved Stability」の頭文字をとったもの。
身長142センチ、体重38.5キロと人間に近いボディサイズながら、荒れた不安定な路面で歩くだけでなく、走ったりジャンプしたりすることができる。
非常に優れたバランス感覚があり、どんと押されたりしても倒れたりはしない。
研究室での試験では、秒速2.1メートルの速さで歩くことに成功。これは二足歩行人型ロボット、いわゆるヒューマノイドとしては、現時点での世界最速記録だ。
まるで筋肉のようなエネルギーを動きに変える装置
アルテミスの大きな特徴は、アクチュエーター(エネルギーを動きに変える装置)がまるで生物の筋肉のように動くことだ。
一般的なロボットのアクチュエーターが硬直した位置制御しかできないのに対し、アルテミスのものはバネのように力を制御することができる。
アルテミスを開発したロボット工学・メカニズム研究所(RoMeLa)の所長であるデニス・ホン教授によれば、これこそがデコボコとした路面でも優れたバランスを発揮する秘訣なのだそう。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る私たちが走れば、両足が地面から浮いている瞬間もある。アルテミスはそれと同じことやってのける「世界で初めてのロボット」なのだと、同教授はプレスリリースで説明する。
アルテミスのもう1つ凄いところは、アクチュエーターが油圧式ではなく、電動制御であることだ。そのおかげで動作時のノイズが少なく、油圧の欠点である液もれに悩まされることもない。
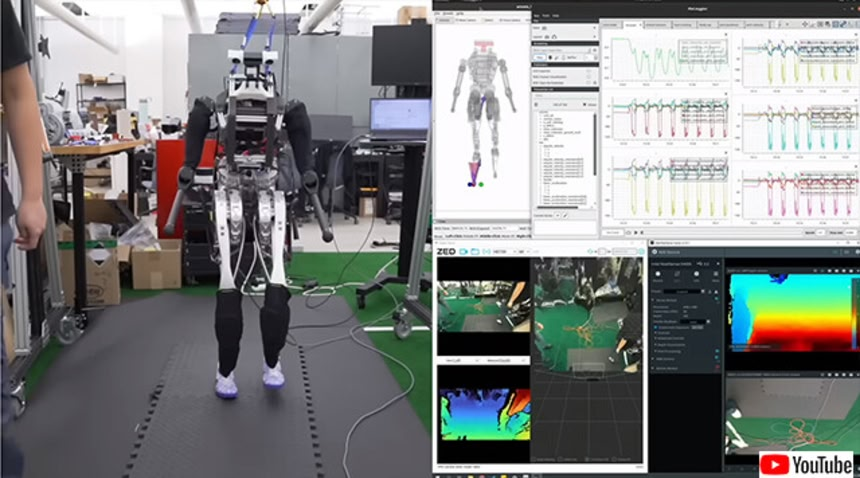
アルテミスが不整路面にうまく対応できるのは、センサーとアクチュエーターで構成されたシステムのおかげだ。
両足には専用設計の力覚センサーが内蔵されており、これが移動中のバランス崩れを防ぐ。また頭部の位置確認装置とカメラで、周囲の状況を把握することもできる。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るいよいよ強化訓練が始まった!
RoboCupでの試合に備えるため、これまでアルテミスは大学キャンパス内を散歩してテストを重ねてきた。
だが今後は、ランニングやサッカーのテストも始まるとのこと。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るその際には、ただの移動性能だけでなく、転んでしまった後で立ち上がる能力や、物を運ぶ能力などもチェックされることになる。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るちなみに20年以上ヒト型ロボットの研究開発を続けてきたロボット工学・メカニズム研究所は、RoboCupで5度の優勝経験がある強豪なのだとか。
今、研究チームは6度目の優勝トロフィーをその手にすべく、アルテミスの調整に余念がない。
References:ARTEMIS – UCLA’s most advanced humanoid robot – gets ready for action | UCLA / written by hiroching / edited by / parumo














ロボットでも、あるでミス
やっぱ蹴らないとダメなのかなぁ…
両手で押したらダメなのかなぁ…
ローキックは意味ない感じするけどなぁ…
>>2
古小屋の歪んだドアとかを強引にこじ開ける時の感覚で言うと、
「手で押す」よりも「足で蹴る」方が
はるかに楽に強い力を加えられると思う。
あと、手で押すと、対象物がふいに動いたとき
こっちも一緒にバランスを崩して転倒しやすい。
ゴチャゴチャした凹凸のある金属だと、
靴のゴム底で蹴った方が、素手に比べて
変な当たり方してもそんなに痛くないという安全面もあると思う。
えっと、つまり……疾風!アイアンリーガーが実現可能な時代が来るってこと!?
>>3
正々堂々試合開始!
以後、日本ガー禁止
文句言うくらいなら、変えるために自分で動こうぜ!
JUST DO IT.
人間がロボットに扮して、とことん虐められた末に逆襲するCGで作られたジョーク動画を思い出して、どーもいけないw
上からつらないと動作できないロボットに価値はない
>>7
ありゃ単なるパワーサプライで吊ってる訳じゃないぞ
それはそうと、ボストン・ダイナミクスといいM.I.T.といいロボットの安定自立性のデモには足蹴にするのがデフォなんだな‥‥
四股を義肢にしたハイブソルジャーみたい
分かるやつおるかな(´・ω・`)
あんまり体幹強くするとファウル取れなくなるぞ
2足歩行ロボットが現れてから長いけど
いつまで経っても中腰のままだな
>>10
足の指が無いから仕方ないね。
もう一個関節を足すだけなんだけどどこもやらないよね。
我々が事も無げにこなしてる二足歩行がかくも難しいというのが不思議なところ。まだまだぎこちなさが消えない。
ロボットがうまく転んで痛がってるのいいね笑
普通の人間用のスニーカー?を履かせているのは、
デモンストレーションとしての見栄えのためなのか、
さまざまなコンディションの地面に対応したグリップ力・
床を傷付けないクッション性などの実用面で
意外とこれが手頃な素材だからなのか?
この手のロボ定期的に見かけるけど
人間のように直立しておらず
重心が凄い後ろなのはどうにかならないのだろうか
>>16
人間が保有するような高性能バランサーとそれに連動して肉体を細かに制御する
高性能な制御メカニズムがない限り難しいのだ!
>>16
でも、古今東西 人間のいろんな格闘技で
即座に行動に出られる or 防御対応できるための構えでも、
膝を軽く曲げて 胴を引き気味に屈め、手をやや前に出した
こういう姿勢が基本のことが多い気がする。
>>16
二足の直立って超高難度なんやろな
いっそR2-D2みたいな方向で極めてほしいわ
使われるのはサッカーより兵器ですから
ナショナルのギンギラー2世を思いだしたわ
未来のドッグランはロボットも参戦か?犬型ロボット「Spot」がおねだりをはじめました
ホンダはASIMOを止めてしまったのは失敗だったのでは
>>22
一応その技術を応用したロボットはやっている派手なパフォーマンスはしてないけどね
>>22
失敗も何も、そもそも二足歩行ロボットは今までまともなビジネスに繋がらなかったんだが?
ボストンダイナミクスだってGoogle→ソフトバンク→ヒュンダイと売却され続けてるくらいだし、ここみたいに大学で研究するのが関の山だろ