
 この画像を大きなサイズで見る
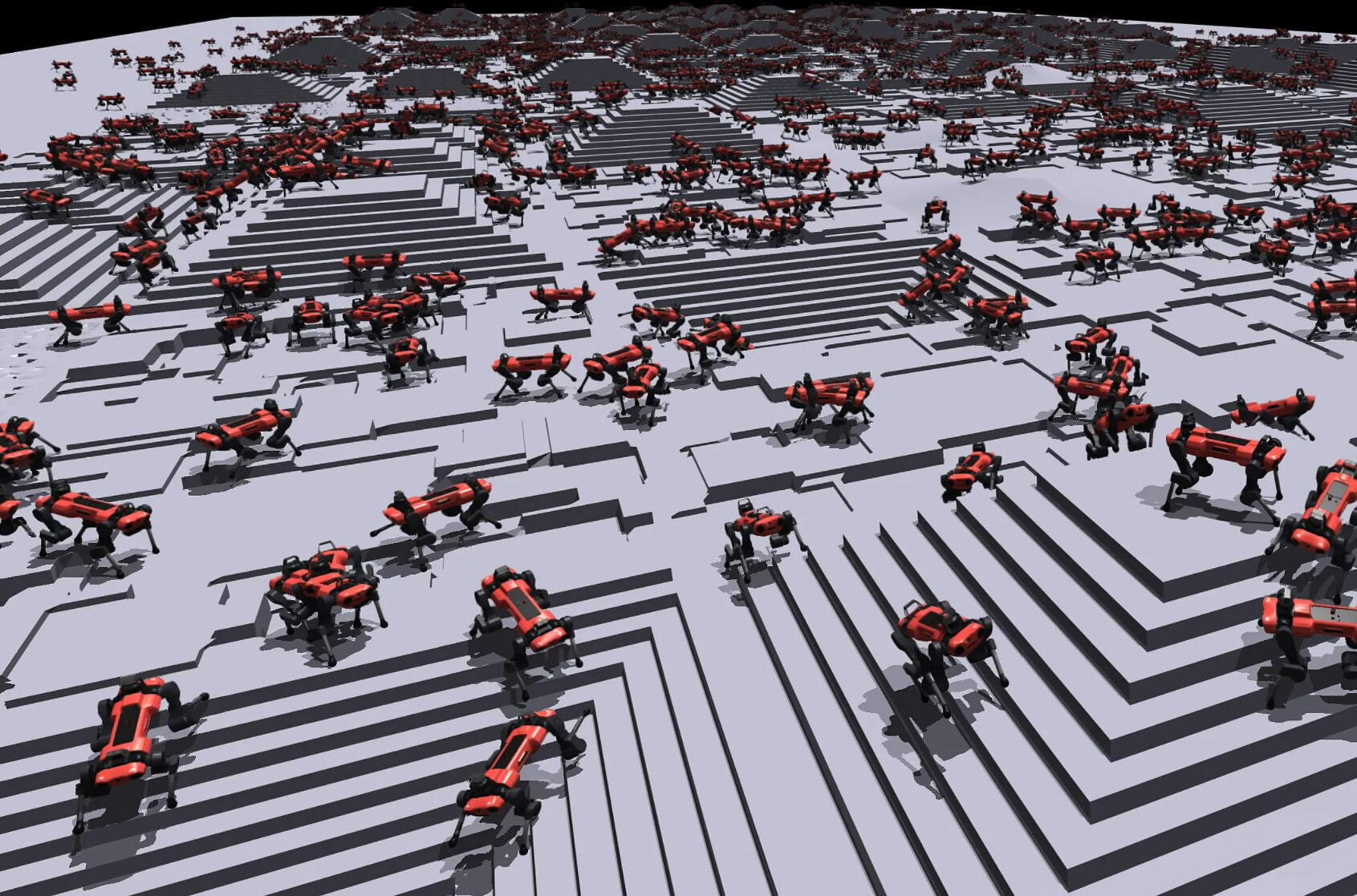
この画像を大きなサイズで見るゲームのステージのような仮想空間でわらわらと動いているのは、歩き方を学習している真っ最中の犬型ロボットたちだ。
4000体以上の仮想ロボットの群れは、チューリッヒ工科大学と半導体メーカーNvidia社の研究グループによって開発された。
その狙いは、仮想空間内に作られたバラエティ豊かな地形で、複雑な現実世界の歩き方をアルゴリズムに学ばせることだという。
AIを利用し、仮想空間でリアルな歩き方を学習
複雑で、予想できない地形だらけの現実世界の歩き方を、人間が手作業で1つ1つプログラムするのはあまり賢いやり方ではない。
それよりも人工知能に学習させてしまった方がずっと手っ取り早い。
そこでチューリッヒ大学とNvidia社の研究者は、段差や坂道など変化にあふれる地形を仮想空間内に用意して、仮想ロボットに歩き方を学習させることにした。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るシミュレーションによる強化学習
「ANYmal」と呼ばれる仮想ロボットの集団は、難しい地形に直面するたびに制御アルゴリズムを洗練させ、少しずつ足の動かし方を覚えていく。
こうした学習は「強化学習」と呼ばれるものだ。動物が失敗や成功体験から学ぶように、ロボットもまた足を動かしたとき、それが歩行にどのように影響したのかフィードバックを受けて、アルゴリズムを微調整していく。
一方、仮想空間におけるシミュレーションなので、失敗したとしてもロボットが壊れることはないし、現実よりも時間の流れを速めることもできる。
そのため、ロボットの動作テストにかかる時間とコストを大幅に削減できるのがメリットだ。
従来の100分の1の学習時間で歩き方を習得
こうして完成したアルゴリズムを、現実世界のリアルな犬型ロボットに実装したところ、階段やブロックなどをきちんと歩くことができたという。
また、シミュレーションに使われたチップは、一般的なコンピューターやサーバーのものではなく、Nvidia社が開発した専用のものが利用されている。
そのおかげもあって、学習時間を従来の100分の1にまで短縮できたそうだ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る次なる課題は登ったり滑ったりという動きのシミュレーション
ただし、仮想空間での学習にはまだ課題もあるようだ。
たとえば、歩行速度を速めると不具合が生じている。これはアルゴリズムが認識する仮想空間の環境と、センサーを通じてロボットが認識する現実の環境とにズレがあることが原因と考えられている。
また専用チップ自体も完全ではない。Nvidia社のチップは、グラフィックの描画やニューラルネットワークの制御は得意なのだが、登ったり滑ったりといった物理的なシミュレーションがまだ苦手なのだそう。
そこでソフトウェア的にそうした問題を回避する工夫が必要だったとのことだ。
この画像を大きなサイズで見る歩行以外の学習に応用も
今回のようなロボットの学習法は、歩行トレーニングだけでなく、荷物の仕分けや衣服の縫製、農作物の収穫など、現実世界でロボットが担うことになるさまざまな作業の学習にも応用できる可能性がある。
また、こうした研究は、人工知能の今後の発展のために、シミュレーションと専用チップが重要であることを示しているそうだ。
References:Robots Are Being ‘Trained’ To Walk Using Virtual Obstacle Courses | Tech Times / written by hiroching / edited by parumo















人って無意識にだけど、相手の顔の向き目の向き、身体の傾け方とかでどう動くか予測しているよね
(ちょっと横にそれるけど、歩きスマホは本人が危ない云々よりも、この動態コミュニケーションを無条件拒否されてどう動くか予測つけづらいから嫌い)
モノというか地形にしたって、例えば階段とかも視覚から判断して無意識に力の加減変えてたりするし
だからあと一段あると錯覚しているとガスンッ!ってなっちゃうわけで
こういう状況判断や運動の最適化みたいなのもAIでできるようになるんだろうか
※1
予測を裏切る動きをかっこよく言うとフェイントですね。
右に行くようなふりして左にいくとかね。サッカーやボクシングなど対人競技ではよく使われます。
大人も段差を学習しているから脚をどう動かすかわかりますが、まだ学習が終わってない赤ちゃんはすぐ転ぶわけですわ。シミュレーションが進むと、人間が予想もしなかったような段差の越え方が生まれたりしてね。期待してます
森川君やんけ
身の丈に合わない道を進む馬鹿な子に育てて立ち往生させちゃったっけ
凍結した路面とかでスリップしそうなときにも瞬時に立て直せる、新たな乗り物の予感…(過大な希望?)
「ここ絶対に触ったらあかんぞ」って言葉で
言われてるから状況が把握できて注意できる系の
パッと見大丈夫だけど注意しなきゃいけない状況を
ロボットが理解して対応できるようになるにはまだまだ先だね。
すげぇ、その内蹴ったら蹴り返してくるようになるかも
なんとなく「むにむに公園」を思い出した。
※6
台車でやってみたいこと
ロボットの手やマニピュレータと生活用品の上手な掴み方も
仮想空間で模索できるようになれば
機械の歩き方と合わせて電子制御義手や義足も安く便利になるかな
むにむに教授かと思ったら違った
四足歩行ロボは米中をはじめ各国の企業や大学で研究が盛んだけど日本はあまり聞かないなぁ。
短中期的に人間の生活圏で活躍するロボットとしては、二足歩行より安定感があって車輪ではいけない階段なども踏破できる四足歩行ロボだけど思うけど、この日本の遅れはマズいんじゃないかな?
それと記事の最後でも触れられている専用チップの開発。AI専用チップに関しては今世界各国で大手企業からベンチャーまで巻き込んで開発競争が起きていてる。つまり半導体の新規市場を開拓するチャンスなんだけど、ここでも日本企業の存在感は薄い。日本は半導体復活を掲げているけど、今目の前で起きている千載一遇のチャンスをただ見ているだけで逃すようなら難しい。