
 この画像を大きなサイズで見る
この画像を大きなサイズで見るAdvertisement
犬のような4つ足ロボットや、ヒトのように2足で走るロボットなど目覚ましい発展を遂げるロボット分野にて、新たな仕組みのロボットが脚光を浴びている。
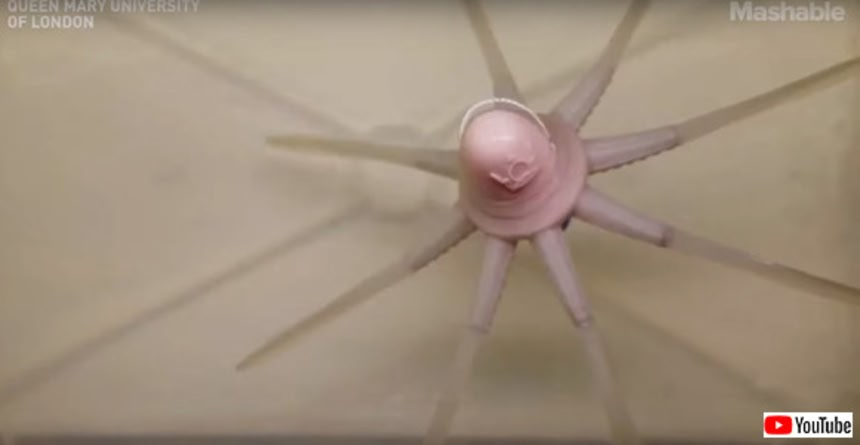
こちらはなんと8つの触手をタコそっくりに動かし、方向を変えながら水中を泳ぐことができる。
ロンドン大学のソフトロボット技術で生まれたしなやかな動き。これが未来のヒト型ロボット開発に役立つと期待されている。
新たな仕組みでリアルに泳ぐタコ型ロボ
このロボットはイギリスのクイーンメアリー(ロンドン大学)でロボット工学を専攻するジャン・フラスが制作したもので、同大学が開発したソフトロボット技術が用いられている。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る本物のタコの動きを模倣するこのロボットに使われたのは新たな作動方式だ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこのタコのシリコンゴム製の触手には空気圧バルブがあり、その開閉をコンピューターで制御することで向きを変えられるようになっている。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこの工夫によってとてもリアルで自然な動きが可能になったのだ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る目標は人間そっくりのソフトロボット
こうしたソフトロボット技術は、人間の動きを模倣するロボットの開発に役立つと期待されている。
なおこのタコ型ロボットは、米国電気電子学会が2023年にロンドンのニューアムで開催する「ロボット工学とオートメーションに関する国際会議( IEEE International Conference on Robotics and Automation)」で、イギリスを代表するテクノロジーの一つとして紹介されるという。
現時点では複雑な動きの模倣は難しいようだが、研究の積み重ねでメカメカしいロボットとは一味違う、柔らかくてなめらかに動くヒト型ロボットが誕生するかもしれんのう。
References:standard / youtubeなど /written by D/ edited by parumo
📌 広告の下にスタッフ厳選「あわせて読みたい」を掲載中















物をつかんだり作ったりするには人間の手よりもタコの腕のほうが優れてると思う
進歩してもっと蛸の動きを模倣できるようになったら、ルンバみたいに水中掃除用の自動ロボットになったりせんかな、水槽掃除とか大変でこう言うのが自動で掃除してくれると助かるんだが。
これは…マル・デ・タコ!
タコの足は脳とは別に、各々が反応したり簡易的な思考までやれるらしいね
これで頭をわきわきされたら髪が復活するかな・・・
されたい
実物をつくられると、そういうことか!ってなる。最初に産み出すひとは凄い
このタコ野郎!!(褒め言葉
マル・デ・タコ
吸盤制御もできると手術系で革命が起きそうな気がする
空気圧+ロボットっていうとかなり昔の万博で顔と手だけの仏像を模したロボットがあった様な
当時から空気圧制御による柔軟な表情と動作が注目を浴びていたらしいけど
事故で失われてしまったらしい
問題は味と食感だな
ちん○やんけ
ミタ・メ・タコ
敵戦艦のスクリューに巻き付いたり機雷を持たせたり・・・
英国面がプラスに発動した時、世界はあの国にひれ伏すことになる。
まぁ、滅多にプラスに振れないんですがね。
このロボの研究者、やはり Dr.オクトパス と渾名されてるんだろうかw
タコというよりは、まだクラゲですな。
腕の素材の柔軟性に依存している段階ではね。
タコというからには、腕の隅々まで神経と筋肉が行き届いてないと。
>>17
だよな、全然タコじゃない。
タコは基本的に放射的な動きはしない。
タコはもっとネコみたいに柔軟に動く。
足の長さのうち可動部が1/3しかない
あとの2/3は引きずられているだけなので、リアルで自然な動きとは全く違う
※18
だからどうした?
不満ならもっとナチュラルなもの作ってみろよ。
>>24
お前はプロ野球のヤジに対してじゃあお前がマウンド立ってみろよって言うんか笑
※31
野球のヤジってほんと下品な文化だと思う
なんか、色味からして、タコ以外の何かにしか見えないんだけど。
作った人はもう少し色を考えた方がよかったのではないかと思う。
学天則的な仕組みなのか?
色がなんか…さあ…
コレクションしておきたいかなと思ったので置いておきますね
Bio-Inspired Octopus Robot Based on Novel Soft Fluidic Actuator(v=ef9s4-pnePM)
うん、気に入るんじゃないかなと思ったんだ
土星バーストとか落としそう
なぜ肌色にしたし
ルアー釣りのワームでこういうのあったら楽しそう!
クラゲだな
ひらめいた!
サイバーボッツのアレではないのか
タコ・ソ・ノモノ
おそらく日本人の一部(または大部分)だけが、違う方向性の開発を考えている。
まんま宇宙戦士バルディオスのビッグオクト
ドックオック
>人間そっくりのロボット
日本「美少女なら任せろー」
目指しているのは
柔らかくてなめらかに動くヒト…の体の一部型ロボット て感じ