
 この画像を大きなサイズで見る
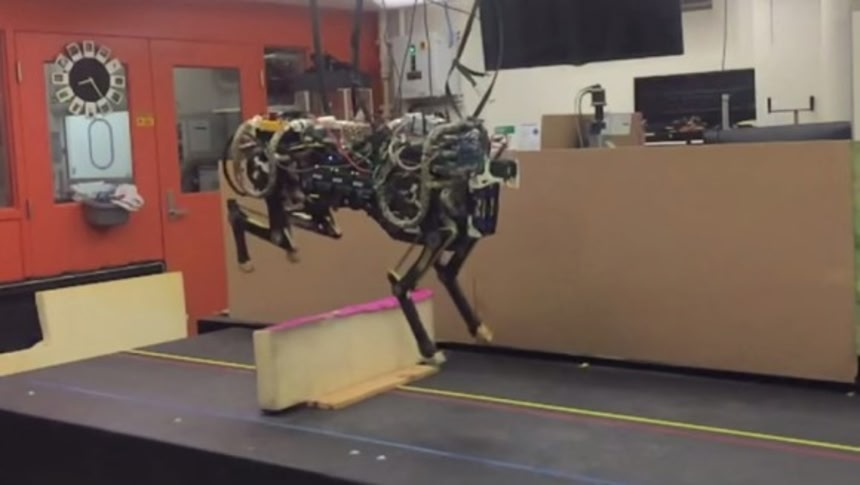
この画像を大きなサイズで見る急速に進化するロボット開発の現場だが、この度米マサチューセッツ工科大学(MIT)の科学者がチーター型ロボットを走らせながらハードルを飛び越えさせることに成功した。これは4足ロボットが自律的にランニングジャンプを成功させた初めての事例である。
ランニングジャンプを実行するには、ロボットはまず、人間のランナーと同じく、走る経路を決めなければならない。次に障害物に近づきながら、その高さと距離を推測する。そして、ジャンプする最適な位置を測り、歩幅を調整したら、飛び越えるための力を行使する。さらに、障害物の高さに基づいて、無事着地するための力を適用し、元のペースに戻る。
トレッドミルと屋内トラックを使った実験では、チーターロボットは平均時速8kmで走りながら、高さ約46cmという、自分の半分ほどの高さの障害物を見事に飛び越えた。
「ランニングジャンプは実にダイナミックな行動です」と語るのは、MITの機械工学の助教授、金相培氏だ。「バランスとパワーを管理し、着地の衝撃にも対応できなければなりません。私たちのロボットは、こうした高度にダイナミックな行動に特化して設計されています」
金氏のチームは、6月に米国防高等研究計画局のロボティクス・チャレンジにおいて、チーターロボットによるランニングジャンプを披露し、7月には学会で自律システムの詳細に関する論文を発表する予定である。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る見て、走って、ジャンプ
昨年9月、同チームは、チーターロボットが何にも繋がれずに走れることを実証した。金氏はこの機能について、カメラなどの視覚システムを搭載していなかったことから、”盲目”のパフォーマンスと呼んでいた。
だが、今回のロボットは、LIDARというレーザーの反射を利用して地形をマッピングする視覚システムを搭載しており、”見る”ことができる。研究チームが開発した3種類のアルゴリズムは、このLIDARのデータを利用して経路を計画する。視覚と経路計画システムはどちらもロボットに内蔵されており、自律コントロールが可能となっている。
 この画像を大きなサイズで見る
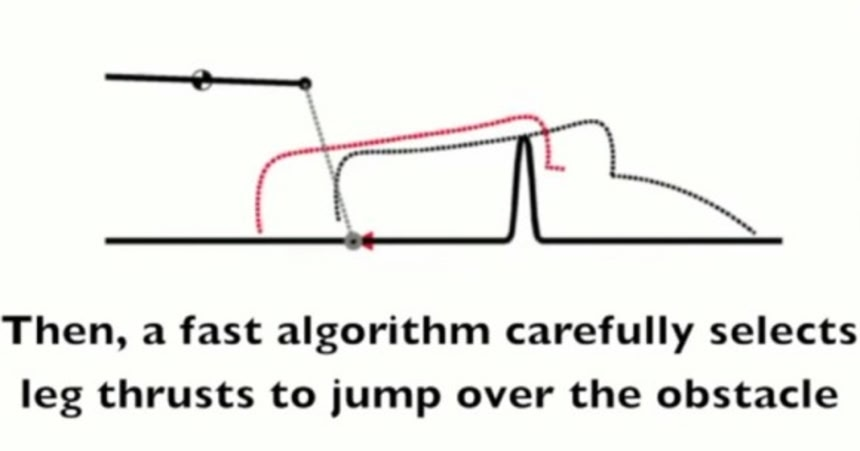
この画像を大きなサイズで見る最初のアルゴリズムは、ロボットに障害物を検出させ、その大きさと距離を推測させる。ここでは、視覚を単純化し、地面を直線として捉える手法がとられている。すべての障害物は、この直線からの逸脱として認識される。
こうしてロボットが障害物を検出すると、2番目のアルゴリズムが起動して、ロボットが障害物の側に行くまでのアプローチを調整する。アルゴリズムは障害物までの距離に基づき、これを無事にクリアするための最適なジャンプ地点を予測する。そして、ここから残りの歩幅を調整しつつ、加減速しながら目標のジャンプ地点まで進む。このアプローチ調整アルゴリズムは、一歩ごとに歩幅を最適化するが、それはわずか100ミリ秒と、半歩の間の出来事だ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るロボットがジャンプ地点に到着すると、3番目のアルゴリズムが介入し、ジャンプの軌道を決定する。障害物の高さとロボットの速度に基づき、障害物を無事に飛び越えるためにモーターが発揮するパワーが決定される。これはロボットの通常の歩行に加えるパワーを増加させるもので、金氏によれば、本質的には「小さなジャンプの連続実施」なのだそうだ。
完璧は敵
面白いことに、アルゴリズムは最適な跳躍コントロールを実施するものではなく、むしろクリア可能なものであるにすぎない、と金氏は述べている。
「例えば、エネルギー効率などを最適化しようとすれば、ロボットに障害物をギリギリで飛び越えさせることになるでしょう。ですが、これは危険なやり方で、本当に最適な解を求めるために膨大な計算時間がかかってしまいます。走行時においては、より効率的な解を求めるために長い時間を費やしたくはありません。クリア可能なものが分かればそれでいいのです」と金氏。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るつまり、これによってロボットが必要以上のジャンプをしてしまうこともあるが、それで問題ないということだ。最適解に固執してしまえば、走っている間に必要とされる迅速な判断ができなくなってしまう。
チーターロボットの跳躍実験は、まずトレッドミルで行われ、それからトラック上で実施された。トレッドミル上では、様々な高さの障害物が流された。だが、トレッドミルの長さは4mしかなかったため、中間を走るロボットはわずか1mのうちに障害物を検出し、ジャンプを計画しなければならなかった。それでも、数回の実験で70パーセントの成功率を叩きだしている。
これに比べると屋内トラックでの実験は、スペースと時間が多く取れる分はるかに簡単であり、90パーセントの成功率を記録した。
なお、研究チームの今後の課題は、草原などの柔らかい地形でランニングジャンプを成功させることだそうだ。















すっげーーー
あとは右折、左折、
人に蹴られてたbigdogの頃が懐かしい
※2
そろそろ頭部つけて欲しいよな
それとも頭はやっぱり飾りなんだろうか
もうアシモ超えたな
動きがリアルな人型ロボットはキモイけど動物型ロボットでも充分キモイな。
こんなもんが追いかけてきたらと思うと…
※4
二足歩行のアシモを四足歩行のこれがどのように超えたのか詳しく解説してくれ
チーターというほどの走りにはなっていないぞ~。
なんか見てて”がんばれ!”っていいたくなるな
※6
君は産まれてすぐに歩けた?
ハイハイだって無理だったはずだが。
6足なら分かるけど4足で、というのは凄いですね。
願わくば、軍用化されて人間狩りに使われない事を祈りたいです…
凄いところまで来たなぁ…
十数年後とかには人口皮膚でカモフラージュしたら自然の動物と区別つかなそう
※8
“犬”と呼ばれる俊敏かつ厄介な兵器に対抗すべく
“骨”や”おすわり”が開発される事でしょう。
すげぇΣ(゚д゚)
これ、あの蹴っ飛ばされても耐えてた健気なロボの進化形?
生き物の動きを機械で再現するって凄く難しいんだなと改めて思った。
自然ってすごい。
チーターというか生まれたての子牛のような
でもすげぇ!
本当にあと20年もしたらアンドロイドとか実現してそうだなあ
ドキっとはするが、可愛いか?
※13
そういう事が言いたいんではないと思うんだが・・・
そもそも「チーター」と名づけたのならそれ相応の「らしさ」は必要かと・・・
まぁ動物のチーターかはわかりませんが
※13
言いたいことがすげーずれてる気がするんだが…成長過程で習得できる技能とロボットのようにそれを目的として作られるものを同一視してどーする
凄いの一言 応援したくなる 生きてないのに愛らしさを感じる。
ボストンダイナミクスかと思ったらMITか
ジャガー、イジェークト
四足歩行は二足よりは容易でしょう。 原始的な生き物ほど足が多いし。
それでも動物のメカニズムを機械で再現するのは大変な作業なんだな。
日本はどんどん置いていかれる
※18
実はこいつ、カンガルーみたいなジャンプ走りなら
後ろ足だけでも走れるんじゃないかって気もする。
走り方がもう機械と思えない
こんな研究してたら毎日が楽しいだろうな~
※19
日本はそれほど軍需開発とかして無いからね。
元々これは歩兵用ウェポン・キャリアとして研究されていたものだから。
足の動きがチーターとは違うようだが。
どちらかといえばウサギじゃね?。
これ、大きくしたら乗れそうだな。
あぁ^~ロボットがぴょんぴょんするんじゃぁ^~
まだ若干のぎこちなさは残るものの、進歩は充分感じ取れる。
ロボットって何だかワクワクさせてくれるな。
最終目標は、中山大障害かな。
あかん映画チャッピー見た後なんで
なんか妙に感情移入してしまった・・・
がんばれチーター(;Д;)
カタカナのチーターは cheater かと思っていた私は心が汚れています、ごめんなさい
今でこそ駆けてる姿が可愛いもんだがこれに敵認識システムとマシンガン積むんだろ?
足が並行して固定されてない動きになったら完璧に動物っぽくなるな
この手のロボットに銃火器や赤外線モニタが装着されることを考えると震える
ロボットがおおよそってのを理解し始めてる
四つ足ロボレースまだー?
燃料含めた重さが課題なのかな
早く首に相当するもの付けてあげて欲しいなあ
そしたらもっと可愛く感じるんじゃなかろうか
キャシャーンに出てたカッコイイ四足犬型?ロボ思い出した!
もっと前だとバビル2世か?
背筋を使えるようになると
もっと自然な動きになるな
拙い動きがなんか健気だな
可愛く思えるのはなんでなんだろw
足運びが本当の四足動物みたいになったら、一瞬動物かと勘違いするようになるかもしれない
走ったりジャンプしたりは凄いんだけど、てっこてっこと猫みたいな歩き方したらもっと可愛くなると思うんだ
ここで『かわいい』を望むあたりが日本人なんだろうかw
日本は四足歩行のロボットつくらないのかな
くそっ!負けてられん!!!
行けっアシモ!こっちは棒高跳びだ!!!!!
※40
餌付けですか(笑)あるいは高電磁おすわりガンとか(笑)
こんなのがクレイモア纏って突っ込んできたらRPG撃ち損じるだろうな。
胴体にも柔軟性を持たせることができたらもっと自然な動きになるだろうね
あともう少ししたら、
個人オーナー(飼い主?)が帰宅した時、家の奥から
ダッシュ+ジャンピング歓喜アタックを受けることになるのか…
コイツは初めて見た時からどうにも駄目だ。
見た目と動きのギャップがありすぎる。
あの蹴られても倒れない奴か?
遂に来る所まで来たな!やはりロボット工学はまだまだ行けるのか!
重量を軽量化させて仕上げないと、着地で足先が地面に突き刺さってヂ・エンドなんじゃ?
未来の教科書に載ってそう
ダミーでもいいから頭をつけるだけでだいぶ見た目の印象変わりそうな気がする
一日一歩 三日で三歩
三歩進んで 二歩さがる
ゆけゆけチーター
無人飛行の大型輸送機が砂埃の舞う紛争地域へと着陸し、
開かれた飛行機の後部から、フル装備のチーターがわらわらと展開。
その他のロボットと共に戦場を制圧するが、
コンピューターウィルス、あるいは人口知能の予期せぬ挙動により、通信・コントロールが遮断。
某国大統領の名を受け、現地の様子を視察に行った特殊部隊のエリート集団が、
静かで誰も居ないように思われた廃墟の町のそこかしこから突然現れたチーターの集団により、あえなく全滅。
その頃、某国機密情報のリークで指名手配され、某共産圏の国へ亡命していた、
元特殊部隊かつスーパーハッカーの某氏にエージェントが極秘に接触。
これまでのことを全て罪に問わない代わりに、混迷を極める戦闘ロボットの掃討作戦への参加を求めるが・・・
というところまで脳内再生した。
未来はこんなロボが輸送の要になるかもな。
ウィンウィン
「宅配便デス。ハンコ カ サイン クダサイ」
すげえ、でもこれ戦場で兵士に追従して荷物運搬想定してそうだね
※55
続きをよこせw
※54
食って掛かってるけど、ジャンプ出来るってのはデカいぞ?
※71
設計途中の未完品のデモ映像なんだから野暮なこと言うなって皮肉でしょうよ…いちいち解説しなきゃならんのも情けないが
つうかそもそも生物を模したロボットを最適化していく工程なんてまさにその生物の成長発達をトレースする作業みたいなものだから、むしろその指摘の方がとんだ的外れだよ
それともまさかすべてのロボットはタミヤの工作キットみたいに取説通りに組み立てれば一発で完成品として動作するとでも思ってるのか?
単純にかっけー!!
ガワをつけるとどんなかんじだろ?
ロボットて言うと不気味の谷なりがちだが
これはとてもキュートだな飼いたいw
せめて頭をつけてくれ
できれば犬かなんかのキグルミをかぶせてくれ
荷物持ち用またはアイボみたいな愛玩用ならともかく
こんなのが悪意ある人間によって武器として人間に
差し向けられたりしないことを切に願うばかり。
ひっころして止まる安全停止装置よりいいかもしれないw
ケーブル付けたままのアルファドッグが爆音とどろかせながらどうにか走ってた頃から
ワイルドキャットが素っ転びながらもギャロップに成功したってのがついこの前だった気がするが・・・
もうこんなとこまできたのか
オイオイマジでやわらか草原でやる気か?HAHAHA
うちの猫ですら、ソファから飛び立つときに足場が柔らかいのを忘れてて落ちるんだぜ!
(あとテーブルクロスで滑って食器棚に登れず落下もする)
HAHAHA、ロボットがうちの猫より賢くなれるはずが…あるよなー…
最終的にメタルギアライジングのウルフになるのかね
大型犬的な感じがして微笑んでしまう
そのうち前足上げて二足歩行はじめるぞ
メタルギア月光
アメリカのことだから、こういった先端ロボット技術が真っ先に反映されるのは軍事分野だと思うが、犬型ロボットとかできて戦場で兵士と苦楽を共にするようになったら、旧式化してお払い箱になっとき他の記事のAIBOの話じゃないが、「どうか壊さないで」という兵士の嘆願が殺到したりな。
まぁさすがにAIBOほど愛嬌のあるものではないだろうが、極限状態の中で共に過ごすのだから、たとえ鉄とプラスチックの塊でもそれが意思を持っているかのように動く物なら、愛着は持つだろう。
これ見ると日本のロボットは玩具だな
軍事化っても物資輸送用途がメインだしなぁ
これが日本ならこの時点でもうしっかり外装もつけてキャラクター化しちゃいそう
これにアシモ乗せようぜ
単純にすげえと思うわ
これ、競馬ファン的観点から見ると、完全に障害飛越を行う馬の動きに近いんだよねぇ…ネコ科動物のジャンプは、背筋と柔軟な背骨の動きで行うのに対し、ウマ科やウシ科は足のバネだけで行くのと、背骨が動かないから、このロボットの様な動きになるのよ。
認識とか制御の技術はすんごいハイテクなんだろうが、並走するカメラの撮影方法がローテクで微笑ましい
※83
ケンタウロス的なドッキングしそう…
※81
輸送用途っていうのはあくまで開発当初のコンセプトでしょ
ここまで自在に動けるロボット作っておいて輸送用ですなんてありえない
歩兵の半分をこいつに置き換えてやろうってぐらいの野心を感じるよ
日本のロボット開発って目標に野心が感じられないから全然わくわくしない
いかにも出来そうなことを予定通りやってるだけって感じ
動画の最後、並走しているカメラマン達とロボットとの絵がとてもほほえましい。
いつか走って追いつけなくなる日が来るのが楽しみでもあり、それがすこし寂しく感じたりするのかもしれない。
完璧でなくて良い、か
ロボットの世界でも、やはり考えるよりまず行動なんだな
むしろ、あらゆる存在が不完全な理由がここにあるのかもしれない
実存は本質に先立つって言葉を思い出す