
 この画像を大きなサイズで見る
この画像を大きなサイズで見るロボットと言えば、ゴツゴツと硬いボディを想像するかもだが、生き物のように柔らかい体をした「ソフトロボット」の開発が盛んに進められている。
タコそのままなタコ型やクトゥルフめいた触手型など、生き物からヒントを得て開発されたソフトロボットは、人間に近い柔らかさを活かして、生体医工学、手術支援、義肢装具などの分野で活躍すると期待されている。
ノースカロライナ州立大学の研究チームが開発したイモムシのように這いながら動くロボットも、その1つだ。
極薄のペラペラなので狭い場所も潜り抜けることができる、ドアの隙間なんて余裕だ。
イモムシの動きをヒントに開発されたソフトロボット
全長9cmのイモムシ型ロボット(以下イモムシボット)は、「ウコンノメイガ(Pleurotya ruralis)」という蛾の幼虫をモデルにしたソフトロボットだ。
生物の構造や機能から着想を得て、新しい技術に役立てることを「バイオミメティクス」というが、これもその1つである。
その極薄のボディは、2種類のポリマー(プラスチックやゴムなど、小さな分子が鎖のようにくっついた化学物資のこと)を2枚重ねたもので、その上に銀ナノワイヤーが仕込まれている。
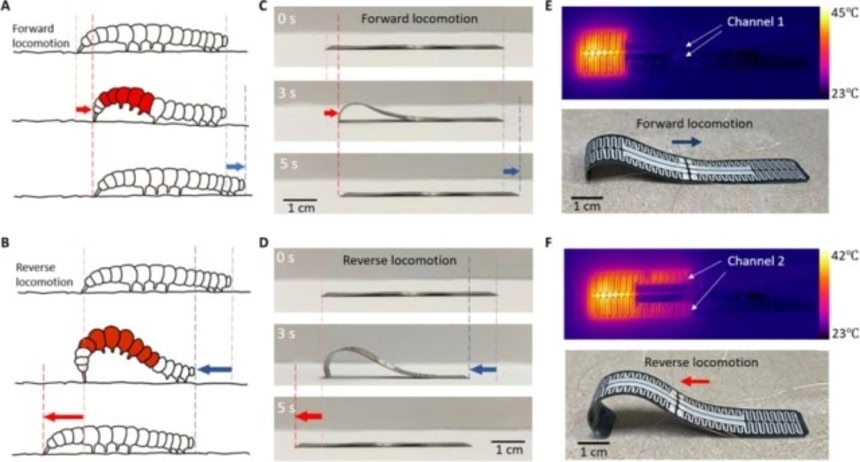
銀ナノワイヤーはいわばヒーターだ。ワイヤーにはボディ全体に沿うようにいくつものリードポイント(電気が出入りする場所)が配置されており、ここに電気を流すと発熱する。
このときその下にあるボディは、ポリマーの種類に応じて、それぞれ異なる反応を示す。上の層は熱されると膨らむが、下の層は反対に縮む。
つまり電気を流すリードポイントの位置をコントロールし、それによって生まれるポリマーの曲率の差異を利用することで、イモムシボットを這い回らせるのだ。
それは本物のイモムシのようで、前進だけでなく後退することもできる。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る本物のイモムシのように動きすぎると疲れちゃう
イモムシボットにはほかにもロボットらしからぬ特徴がある。やりすぎると疲れてしまうのだ。
イモムシボットは基本的に、電気を流せば流すほど、スピードアップする。ただし、あまり鞭打ちすぎてはダメなのだ。
というのも、熱によるポリマーの膨張と収縮を利用したこの移動メカニズムには、冷却サイクルが必要になるからだ。
きちんと冷えないうちにまた電流を流しても、動きが悪くなってしまう。だから電流をちょうどいい塩梅に制御してやる必要がある。
酷使しすぎると動かなくなる生き物の筋肉のようだ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る得意なのは狭い場所、捜索や救助活動での活躍に期待
今回の実験では、イモムシボットを狭い隙間の下に潜り込ませて操作できることも証明されている。つまりは、ドアの下にするりと滑り込ませるような使い方ができるということだ。
イモムシボットの動きを制御する方法は、もともとエネルギー効率に優れたものだが、研究チームは今後さらなる効率化を目指すとのこと。
また次のステップとして、イモムシボットにセンサーなどを取り付けて、捜索や救助活動などに応用できるよう開発を進めていくとのことだ。
この研究は『Science Advances』(2023年3月22日付)に掲載された。
References:Robot Caterpillar Demonstrates New Approach to Locomotion for Soft Robotics | NC State News / Caterpillar-like soft robot can dip under narrow spaces / written by hiroching / edited by / parumo















命名「ニャッキ」
動くフレキシブル基板か。
02年のマイノリティ・リポートでトム・クルーズがバスタブに沈んで隠れても見つけるようなロボットがいたけど、近づいてきたかな。
床下にLANケーブル這わせるのに使えないかな
ある程度進んだら動かす位置を変えるとかさり気なくすごい
実用化されれば瓦礫の中や入口が狭い遺跡などの調査とか活躍が期待できそう
あとちょっとかわいい
ベターマンのあれみたい
芋虫めちゃくちゃ苦手だからこれ見たら腰抜かしそうw
ウミケムシ思い出したw
スリッパ頂戴!!