
 この画像を大きなサイズで見る
この画像を大きなサイズで見るアシストはパワードスーツで?いえケンタウルスで。重い荷物を背負って歩くのは、誰にとってもつらい。そんなお悩みに、ロボットを使う個性的な解決策が話題だ。
中国・深圳の研究チームが、人の背中に“ロボットの後ろ脚”を装着し、歩行を支援する「ケンタウロス型ウェアラブルロボット」を開発。
先入観が邪魔をして、気を抜くと引いて歩いてるだけに見えるが、これを装着したユーザーのエネルギー消費を最大35%減らせるという。
近年導入が進むパワードスーツ(外骨格型)とは、別次元のアプローチ。外ユーザーの間で賛否両論のウェアラブルロボットを見ていこう。
この研究成果は、国際ロボティクス誌『The International Journal of Robotics Research(IJRR)』(2026年)に掲載された。
ケンタウルス発想で生まれた二脚ウェアラブルロボット
こちらが中国・深圳の南方科技大学の研究チームが開発した、人の背後に二脚ロボットを装着して使用するウェアラブルロボット。その名もまんま「ケンタウルス(Centaur)」だ。
ギリシャ神話のケンタウロスのように、人間(前)+ロボット(後ろ脚)が一体となって歩くという、かなり大胆な発想に基づいている。
 この画像を大きなサイズで見る
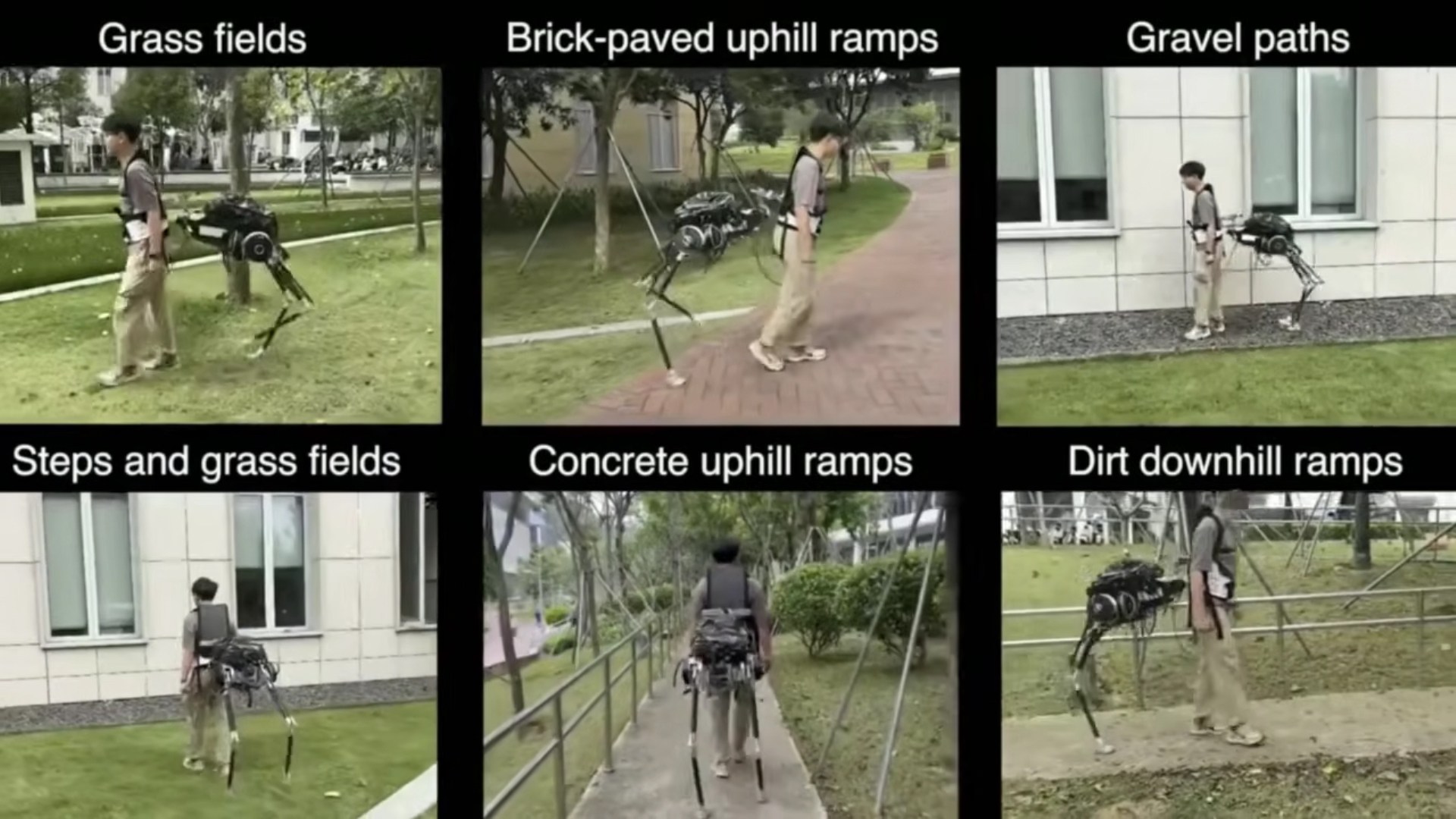
この画像を大きなサイズで見るそのデモ動画では、研究者が大学キャンパスを歩き、階段を昇り降りする様子などが確認できる。
後ろ脚であるロボットの脚は、ユーザーの動きに合わせて追従し、方向転換や速度変化にも自然に対応するという。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る外骨格(パワードスーツ)とは全く異なるアプローチ
従来のパワードスーツは、ユーザーの脚などに沿って機械を取り付ける仕様で、機械が動きを直接アシストする。
一方こちらの「ケンタウルス」は、“追加の後ろ脚”として機能。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこの構造により、以下のようなメリットが見込まれる。
- 人の歩行の自由度を奪わない
- ロボットが荷重を肩代わりできる
- 動きの干渉が起きにくい
さらにケンタウルスは、ユーザーの背後との間に非線形バネを用いた柔軟結合機構を採用。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこれは、力が小さいときは、しっかりした安定性を維持したまま素早く反応し、大きな力が加わると柔らかくなる、という特殊な構造。
この仕組みにより、ロボットの力が急激に伝わることなく、歩行リズムも安定し、転倒リスクも低減される、といった効果が得られるという。
つまり”柔らかくつながる”ことで、人とロボットの動作で生じる力をうまく分離している。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る前方への水平推進力の制御で”押される”ような感覚
このロボット脚には IMU(慣性計測ユニット) や関節センサが搭載されており、ユーザーの歩行速度・方向・加速度・歩行フェーズをリアルタイムで推定する。
制御はざっくりいえば、センサで取得したユーザーの動きから歩行状態を推定。これによりロボット脚の軌道を生成し、“押す力”を適切に調整。といったところ。
水平推進力に制御があることで、ユーザーは、ロボットが後ろから“そっと押してくれる”ような感覚になり、歩行が楽になるんだそう。
また多様な地形でのさらなる移動性向上のため、このロボット脚用の地形適応型コントローラも開発され、これにより地形固有の軌道が生成されるようになったそう。
二段構えで最大35%の省エネ効果
論文の実験では、約20kgの荷物を背負って歩く際、代謝コスト(エネルギー消費)が最大35%減少した。これは外骨格型パワードスーツの一般的な効果(5〜12%)を大きく上回る数字だという。
この効率の良さの理由は “荷重支持+推進力アシスト”の二段構えにある。
ロボットが荷物の重さを受け持つだけでなく、さらに前進する力まで提供することで歩行の負担がかなり軽減される。
完全自律型ロボットの課題を解決する新発想
研究チームは、完全自律型ロボットによる荷物運搬には、以下のような課題があると指摘する。
- 地図のない環境でのナビゲーション
- バッテリー消費
- 積載量の制限
そこで「人がナビゲーションを担当し、ロボットが力仕事を担当する」という発想が生まれたもよう。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこの“半人馬(ケンタウルス)方式”は、人とロボットの得意分野をうまく組み合わせたアプローチなのだ。
「人力車的な?」「軍用」「全体的にまずい設計」の声
この斬新なウェアラブルロボットにSNSも騒然。おなじみRedditのロボットマニアの間でも早速話題にのぼり、動画を観たユーザーからはこんな声が寄せられた。
- ショッピングカートに脚をつけるより便利なのか?両手が自由になるから?
- つまり人力車のタイヤじゃなくて脚バージョン?
- 自走式なら歩行も楽になるが、電動カートに押してもらえば良いのでは?
- 唯一の利点は、階段を使って物を運ぶ人を手伝うことができるかもしれない点
- 軍用だろ。このアシストなら兵士が武器を持ったまま、坂道や階段などの段差をよりたやすく移動できる
- すでに手じゃなくて体で押せるハンズフリーのベビーカーがあるけどな。こんなめんどくさいものよりずっと速くて機敏だ
- 無理。荷物を持ったまま走ってるときに転んでみ?これが体に乗り上げて背骨折れるぞ
- え!?人力車って引いてるときに転んだら骨折するの?
- 四足歩行のロボットがいるのにいまさら二足にした理由がわからない
- ディズニーのロボットになる以外の用途が見当たらない
- ロボットの重さの負荷は?わずかでもあれば必ず人間側の動作に制限がかかるだろ。つまり全体的にまずい設計
- この後ろ脚を着ぐるみで覆ったら重いかな・・・
とまあ、ネガティブな声が多めだった。
チームによれば、このウェアラブルなメカメカしい脚が、外骨格の限界を超える“第三の選択肢”という位置付けになるもよう。
個人的にはまず”強い絵面”に惹かれたわけだが、超絶巧妙な錯視というか、どうしても先入観に邪魔されて、「ユーザーが”か細い脚”で足踏みするロボット脚を着けて歩いてる」ように見えてしかたなかった。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る「これはアシスト、アシストなんだ」と自らに言い聞かせつつでも正直言って苦しいわけだが、実際に装着したらきっとおそらく楽なんだろう。
電動自転車の未経験ユーザーの私に見てるだけではその楽さが伝わってこない現象に近いものかもしれないが、とにかくケンタウルス気分になれてしかも歩きやすくなるのならぜひ一度試してみたい。
References: Futurism / VICE / Interestingengineering / Reddit















動画だと歩きにくそうに歩いてる様に見えるけど、そんな事ないんだろうね。 エネルギーは35%カットされても、邪魔くささが勝りそうな気がしないでもないかな
ネガティブな意見も多いけれど、いやこれ面白いよ まさに試行錯誤って感じで
昔の駕籠屋さんスタイルにしてみたらどうかな 後ろをロボが持ってw
発想は面白い。でもバッテリーのブレイクスルーがなければ実用的とは言えない
20年前に開発の話を聞いたし
アイディアはもっと昔からある
ようやく技術が追いついたか
行軍するときのサポート、荷物を載せたりバッテリーを積んだりしてキャンプを張るときは外す
パワードスーツ型なら人は寝ていてもOK牧場だ
ここまでするならいっそのこと4本足にして、人が先導したらどうかな?
占める場所は同じくらいだし。
あくまで2本足にしたいのなら、こうするのでなくて機械の2本足を人間の2本足に沿わせるようにして外骨格スーツみたいにしたらいいと思う。ずっと身軽で場所をとらなくなる。
それじゃ、ケンタウロスになれないじゃないか!(泣)
普段は4足荷物運びロボで、必要に応じてケンタウロス形態にもなれるってのが良いのでは?
現状での利点はデートにこれで行ったら絶対にウケるって事かな?嫌な顔されたら感性が合わない事を見抜けるしね。
だね! お互い可及的速やかに次に行けて、win-winだ!
怪我や筋力が落ちて歩行がままならない人の補助として進化しないかな
ムカデ人間みたいにたくさん繋げたら歩いて壁を登ったりできそう
突然故障して動かなくなったり暴走したりしたらどうすんの?
長距離歩くときにいいなと思ったけど、ダラなのでどうせなら車椅子的なもので連れて行って欲しいとか
荷物はその押してくれるロボットの背中に乗せて欲しいと思ってしまった
すっげーshyなロボに見えるw
ザガロみたいにケンタロウスにクラスチェンジできるのか
紋章のビラクやめいw
お年寄りって前かがみになりやすいから、いつの間にか骨折とか背骨が曲がる前から始めたらよさそうかも?
1日中歩けるならアウトドアとかでも使えそうやな
バックパックの容量気にしなくて良いのはデカい
傘さしてくれ
ジジタウロス、ババタウロスが街に溢れる未来が見える
大馬神とかパーンサロイドっぽい外装付けよう
前の人が突然コケても、後ろ足に轢かれたりしないのかな?
斬新でびっくりな発想だけど、いずれ何かに使えるといいね。
後ろの重量次第だけど転ぶのを検出したら後ろに引っ張って転ばないようにできたりするかも? あと設計次第ですが、座りたくなったら後ろ足をうまくたたんでイヌやネコのようにロボットのおしりを地面につくことで椅子になったりとか、夢が広がりんぐ
おぉ…なんか、希望が見えてきた。
人を助けるマシンになって欲しいな。
せっかく一生懸命作ったんだろうし。
重い物を持って長時間歩くって戦争ぐらいしか使い道なさそう
戦争から民間に降りて来た技術は数知れず
だからね
ここまでするなら一輪車(ネコ)で良くない?
時々「たかいたかい」してほしい。
ロボも、矢継ぎ早の要求に応えるのが大変だな汗
今までになかった新しいアプローチ
でも大股で歩いたり走ったりしたら後ろ足と干渉しちゃいそうだな
これは、中国ならではの軍用装具だね。
戦場で、いざ戦闘となった場合にも兵士が勝手に逃げ出せないように出来るからねw
人型ロボットが後ろから押してくれればそれで済むと思うけど、発想が面白くて好き
もう、介護だね
ちょっと疲れたから座ろうかなあって思っても後ろが邪魔で、さっと座れない。
いいな、これ欲しい
腰が痛くて歩けないからマジで欲しい
認知症の老人のサポートして使えるかな
歩行椅子を比較基準として見たら、中途半端だな。多少安くなるだろうけど、安さでは単なるショッピングカートに敵わないし、ショッピングカートに勝る利点も少ない。団地の階段で荷物を運ぶ配送業なら使えるかな。その場合でも最適設計は別に有りそうな気がする。
脚で歩くという時点で車輪じゃいけないところを想定しているはず。 それは階段だったり、荒れ地だったり、斜面だったりじゃないかな。 今は技術が未熟で平地しかついてこれないダメダメ状態だけど、うまくすると後ろから押してくれたりしないかなと。 あるいは前後を変えてロボットを前にして人間が後ろ脚を考えたけど、あんまりメリットを思いつかなかったのでケンタウロス型のほうがよさそうに思いました。 こういうのは発想力で応用を考えるので、こうしたらどうかみたいな良さを有利にできるシチュエーションを見つけられればと思ってます。 平地で転びそうだけど杖を使わないリハビリなんかどうかなとかもちょっと考えてみましたが、想像力の限界の向こうになっちゃいました orz
つぎは脊髄に電気信号送って(AIが)本体を操縦する方向に進化だな
フランキーケンタウルス方式で前に装着して曳いてもらうのもアリでは?
コーラを燃料にする新技術も併せて開発してほしい。