
 この画像を大きなサイズで見る
この画像を大きなサイズで見るロボットの積載量は、アクチュエーターや駆動系が支持できる重量に従って、厳密に定義される。人間の場合も同様で、荷物を少し降ろしてズルができる以外は、摩擦を超える力で押して、純粋に動かすことになる。
だが、荷物が非常に重い場合は、腕の力以外にも体重や身体の安定性を利用して押すという方法もある。ここで紹介するロボットは、そうした人間の知恵を学んだ賢いやつだ。
このロボットは、5月下旬に開催された米国電気電子学会のロボットカンファレンス”ICRA2015(International Conference on Robotics and Automation)”で、東京大学情報システム工学研究所の稲葉雅幸教授と岡田慧准教授が発表したものだ。
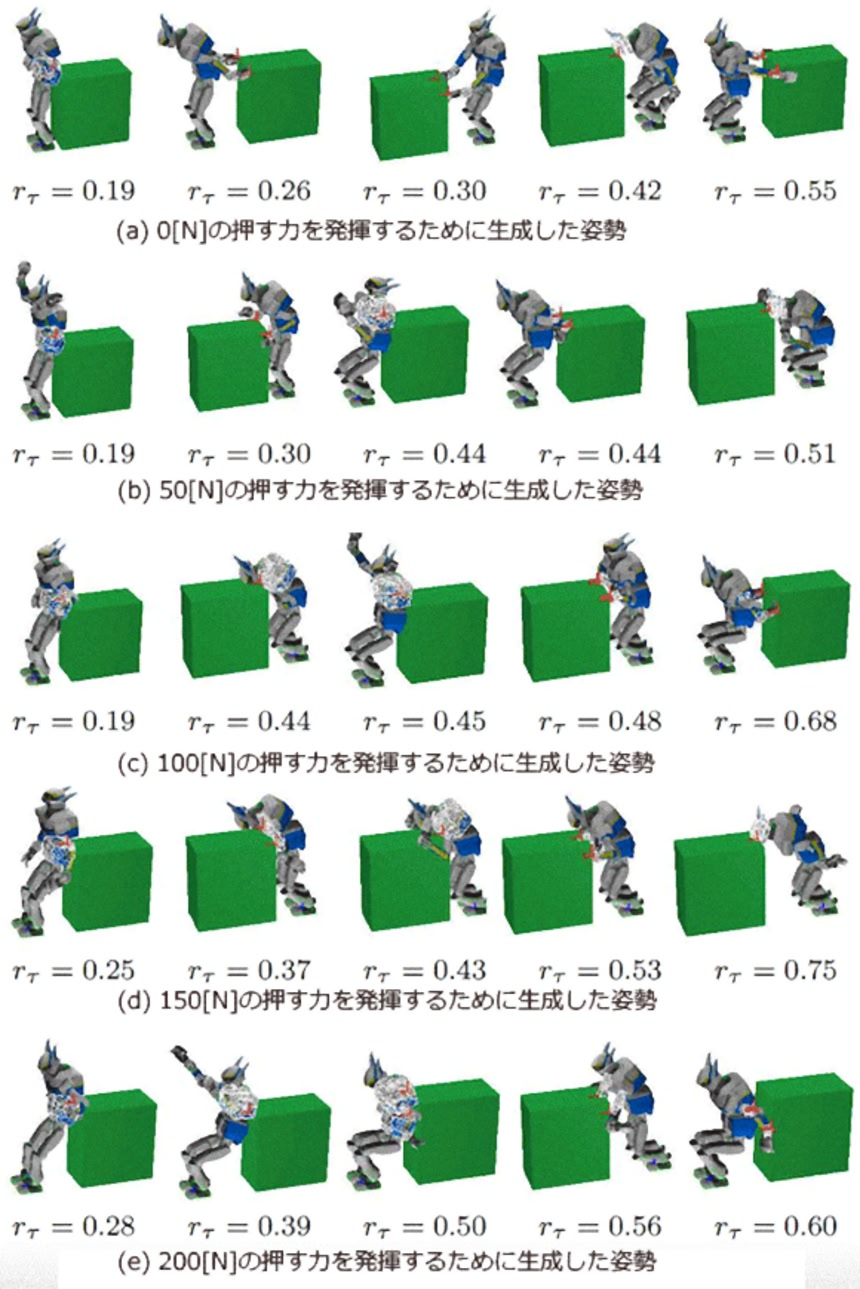
重い物体を押す方法はいくつもあるため、人間にとって物を押すという行為はやや込み入った作業だ。肩を押し付けて押すこともできるし、お尻で押すこともできる。そして、本当に重いのならば、背中から物体に寄りかかって、足で押すという方法もある。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこの物を押す姿勢は、物体の重さと床の摩擦によって決まるだろうが、これは押す前には分からないことだ。それならばどうするのか? おそらくは、まず腕だけで押してみて、それで動かなければ、さらに力が出る姿勢に変えるだろう。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るHRP-2と名付けられたロボットもこれと同じことを行う。まず、いくつかの押す姿勢を前もって計算し、それでは動かないと気がつけば、自動的に別の戦略を考えて成功するまで挑戦するのだ。
また、うまい具合に転倒しないことにお気づきだろうか? これもやはり自律的に制御されており、身体の傾きを検出し、物体の動く距離に合わせて歩幅を調整することで実現している。
研究チームの次の目標は、考えついた方法を他の課題に全身を使って応用させることだそうだ。一体どのような課題に挑戦させるつもりか楽しみだ。















こうして見ると普段何気なくこなしてる動作ってものすごく高度なプログラムなんだな
このロボットの次の段階:「おーい、手伝ってくれー」と仲間を呼ぶ。
↓
さらに次の段階:自分だけ力を抜いて要領よくサボる。
↓
最終段階:「おまえ手ぇ抜いてんじゃねー」とケンカ。
お、この姿勢なら動かせるぞ!
ってわかったあとの張り切りようがかわいい
人間にとっては大したことじゃない思考がこんなに大変なら、もうしばらくはAIロボットに世界が乗っ取られる心配はなさそうかな
チャッピー!チャッピーじゃないか!!
研究チームの次の目標、どういうこと?
ロボットが学習機能を進化していった結果
アメリカ:人間は害悪だから排除する!
日本 :ご主人様は私がいないとなんにもできないんだから
うわ地味!だと思ったけど なめらかな人間らしい動きのロボットを目指すとしたら
こういう研究が必要なんだろうな。
外見だけ人に似せたロボットよりは現実味と可能性を感じる。
てかこれはAIの研究じゃなくて、実際に全身を使ってこの作業を実現させる二足歩行ロボットの研究のほうでしょ?
たぶん
※9
アメリカのロボットは人間の身勝手さに対する憎悪に燃え、日本のロボットは人間の不甲斐なさにもえてしまうわけか。
何だか癒された
ある意味でロボットに自身の体をかばう心を
与えたという事か。昔のSF作品では無理矢理に
ウデだけでがんばってオーバーヒートしてしまう。
※11
「横に力を入れるためには」全身をどう使えば良いか、ってことか。
「バランスをとるためには」「ジャンプするためには」「走るためには」
みたいに応用利くと面白いけど、どうなのかな
勢い余って物をひっくり返した時に決まり悪そうに「テヘペロ」ってやるところまでプログラムしておいて欲しい
確かに物を動かすのって色んなシチュエーションに対応するのはすごく大変そう。
足が滑りやすいとか、台車に車輪がついてるとか、床に段差があるとか、
荷物が崩れやすいとか、下り坂の乳母車とか。
もう少し経つと今度は他の人やロボットが実行している方法を見て、その中から、
最も効率の良い、機体を損傷させない運搬方法の最適解を自ら判断し、
選択する様になったりしそうですね。
重量物押す時にこういう風に押したら真剣に押せとか言われて納得できなかったけどやっぱり間違ったやり方ではなかったか
※17
2300年ロボットの自殺が社会問題に
※17
そしてそんなロボットに萌える俺ら
ルンバやドローンや福島に投入されたロボットの出所見りゃ分かるんだけど、実のところ、人型や二足歩行にこだわりすぎて、日本のロボットって他分野で停滞しまくってて、(四足でも医療用ロボットでも災害向けロボットでも)ますます世界から水を開けられてるんよね。
そんな事してる間に機能性実用性を重視したグーグルやらアマゾンやらにますます制されちゃうよ。日本はまず人型の呪縛から逃れた方がいいと思う。
※18
AIロボの運用はネットワークに繋げる事が前提と思われる
人にはない圧倒的なアドバンテージだからね
すげー!(笑)でもこれに科学者が全力をあげたと思うと凄いシュール。ロボットの開発は高度になるほどお国柄が色濃く出てくるね。子は親に似るというか。
内容とは関係ないけど、データ蓄積してボディを一から設計し直す
際にはガワのデザインを河森正治さんあたりに発注してほしい
どうしたらギックリ腰にならずに済むかまで学習出来たら「ほぼ人間」と言えようw
こういうのって人の構造の研究にもつながるよな。
※25
個体差による経験値の誤差も並列化で短時間のうちに修正、情報の共有が出来るのが機械の最大のメリットですからね
パワードスーツや強化外骨格は人間が必要になるけど、これでしたら人間が行くと危険な場所にも行けて、且つ自ら考えて動けますしね
※29
わあ!手塚治虫の「火の鳥」みたい!
この動画倍速にしてあるっぽい? 実際はもっとゆっくり動作させているけど、それだと間延びするから編集されてるのかな?
初期の頃の小須田部長のコント思い出した
一旦計算上のいけそうな姿勢を取ったあとに、何度か軽く押してみて、動くことを確認してから連続動作に入ってるのが何気に凄いな
いけると思って勢いに任せて失敗してあまつさえ怪我する人間だって居るのに
中にチャップリン入ってないかw
なんだろう、このいじらしさ
日本のロボットってなんか守ってあげたくなる
100%効率てきにおしているわけだから
人間とは違うのだよ 人間とは