
 この画像を大きなサイズで見る
この画像を大きなサイズで見る北極海に浮かぶ氷の上を、1台のロボットが歩いていく。ロボットの足取りは慎重だが、少しずつ前へ前へと進んでゆく。
北極の雪や氷の下には、恐ろしい水たまりが隠れていることがある。その大きさはまちまちで、人も機材もあっという間に飲み込めるほど巨大なものも存在する。
そんな危険な地形を、四足歩行のロボット犬が世界で初めて歩き切った。
犬型ロボットではあるが、足は氷に沈み込まないよう大きめのクマの足にそっくりな鋭い爪がついている。ある意味クマ型ロボットでもある。
参考文献:
- First-ever: Four-legged robot dog successfully walks across treacherous Arctic ice floes
北極に潜む見えない危険な水たまり
北極は、何世紀にもわたって地球上で最も危険な探検地の1つとされてきた。
一見固そうな雪の下に、氷が解けてできた水たまりが隠れていることがあるからだ。
この水たまりは、何の前触れもなく人や車両、観測機器を飲み込んでしまうことがある。
こうした悲惨な事故の防止策の一つである、極地データ収集には長い時間と多くの費用が必要になる。
さらに皮肉なことに、そのデータ収集のために現地に赴く人もまた危険にさらされるなど、過酷な環境でのリスクは尽きない。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る四足歩行ロボットが拓く極地探査の未来
この状況を変える可能性を示したのが、中国杭州市を拠点とするロボット企業DEEP Robotics(云深处科技)が開発した、小型の四足歩行ロボット「Lynx S10」だ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る北極海の海氷上を歩いた初めての四足歩行プラットフォームとなったのは、この自律型ロボット「Lynx S10」の改造機である。
今回の改造版Lynx S10が北極で出した成果は、単純に寒さに耐えたことなどではない。
たとえ経験豊富な研究者でも、予測不能な環境なため、細心の注意を払いながら進むほかない氷や雪、水の入り混じった地形を、コンパクトな自律ロボットが歩けることを示した点にある。
それは人間では簡単には立ち入れない場所での危険な作業を、自律型ロボットが担える可能性を示している。
開発チームは、標準のLynx S10は、自律的な経路計画とインテリジェントな障害物回避を実現すると説明。
斜面や階段など、さまざまな地形や環境を走り抜けるLynx S10の映像は、2026年5月21日にも公開されており、再生数14万回もの反響を巻き起こしている。
重さ20kg未満。1人で運べる小型ロボットLynx S10
今回の北極遠征は、Lynx S10の実環境における耐久試験として計画された。
大型のロボットプラットフォームだと、輸送や設置に大掛かりな準備がいるが、小型のLynx S10ならバッテリー込みでも重さ20kg未満と軽く、1人で持ち運んで展開できる。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る開発チームは、コンパクトな機体により、1人でも持てる手軽さと迅速な展開が可能になることで、運用時の機動性が高まると説明する。
ちなみに標準版Lynx S10の主な性能は次の通り。今回チームは、こうした仕様をはるかに超える雪と氷の課題に挑んだ。
- 重量:バッテリー込みで20kg未満
- 関節数:16個の高精度関節
- 最高速度:秒速8m(平地)
- 障害物:高さ50cmまで乗り越え可能
- 移動方式:車輪走行・脚歩行の切り替え移動、2足起立も可能
- センサー:超広角HDRカメラ4基、前後にLiDAR(レーザー光で周囲との距離や形状を測る装置)搭載
- 積載量:有効積載量8kg超、最大構造荷重120kg
- 動作温度:マイナス20度〜55度
- 防塵防水性能:IP66(国際規格)
- バッテリー:1回の充電で3時間以上稼働、残量がわずかになると自動で充電ステーションへ移動
クマの足を再現した理由
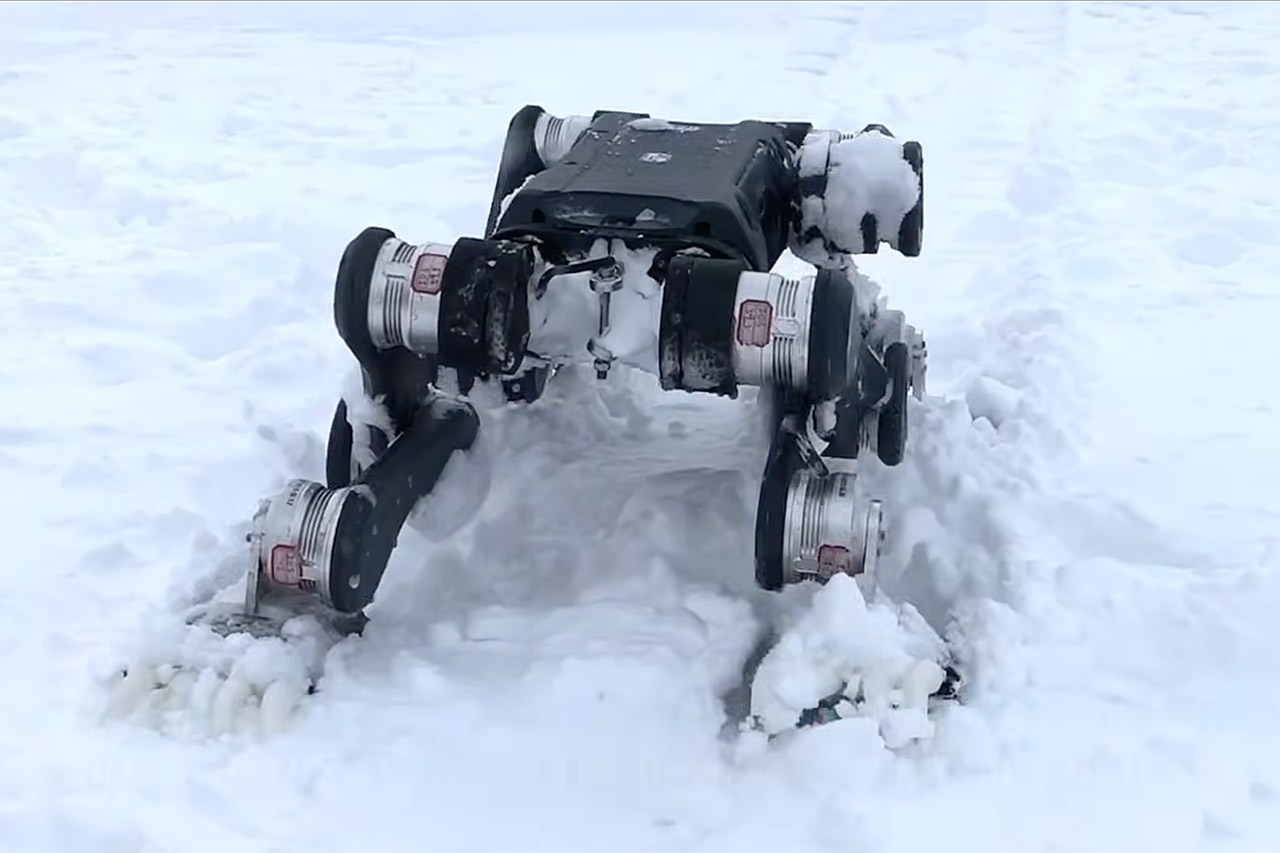
技術者たちは、北極への投入前にこのロボット犬をの車輪を、クマ型の幅広い足に変更した。
この特注の足は、ロボットの体重をより広い面積に分散させ、柔らかい雪に沈み込むのを防ぐ役割を果たす。
足の設計と制御アルゴリズムの開発には、中国の中山大学、西湖大学、杭州電子科技大学の研究者も協力した。
滑り止め加工も施され、氷の上でもグリップ力が保たれるようになった。クマの爪を彷彿させる滑り止めのアイゼン(登山などで氷雪上を歩く際に靴底に取り付ける爪状の金具)も組み込まれ、硬い氷の上でも高い牽引力を発揮した。
防水性能も、標準のIP66から、より保護性の高いIP67へと引き上げられた。
氷と水が混じる環境から、研究者たちはもう1つ改造を加えた。脚の実効的な表面積を大きくすることで、脚がオールのように水をかき、標準の車輪式では進みにくいシャーベット状の氷雪の中でも移動できるようになったという。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る見せかけの氷を渡り切った瞬間
こうした改造の必要性は、北極での試験ですぐに明らかになったという。
複数の地点に、危惧したとおりの見た目では判別しにくい危険な水たまりが隠れていたからだ。
 この画像を大きなサイズで見る
この画像を大きなサイズで見る改造版Lynx S10は、一見安定しているようなのに実際には水の上に浮かんでいるだけの雪にも遭遇した。
そのように危険でまぎらわしいところも、改良されたシステムにより、安定性を保ったまま渡ることができた。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るある場面では、水の上に乗った氷の上も、滑るように渡り切ることに成功している。
その後の試験で、氷と水が入り混じった領域にも進ませたが、より困難な地形でも移動を続けることができたという。
なおこの機体は、開発の初期段階にあるアルファ版のプロトタイプであり、完成した商用製品ではないそうだ。
環境調査や救助活動への応用
今回のプロジェクトは、北極での成功だけにとどまらない意味を持つ。
環境研究者や緊急対応の担当者がやむなく向かう先は、北極のように危険で安全に立ち入れない場所ばかりだ。
DEEP Roboticsの研究者は、Lynx S10は、ほこりの多い現場や豪雨、湿度の高い霧といった困難な環境にも自信を持って対応する、と付け加える。
 この画像を大きなサイズで見る
この画像を大きなサイズで見るこの軽量な自律型ロボットは、今回の改造で不安定な氷を横断し、氷と水が入り混じった環境を移動する能力を得た。
今後は環境データの収集や気候変動に関連する変化の監視、そして人を危険にさらすことなく捜索救助活動を支援するのに役立つ可能性もある。
研究チームは現在、今回の任務で得られた性能データを、今後の設計改良に活用している。
この先登場するであろう新バージョンは、今回の機体以上に予測のつかない自然の環境に耐え、より柔軟に対応できるものになりそうだ。
References: Techeblog / Finance.yahoo.com / Yangtzeer / Deeprobotics














言わずにはいられないけどこれシールドライガーの下半分じゃない?
泳げないのなら使い道がないね
とにかくやれる事をやって踏破性を上げるぞっていう泥臭さが魅力的
紹介映像では4脚ローラーダッシュも決めてて格好いい
動物的な要素が入ると急にゾイドみが出てくる